PWM-サーボ信号変換基板ORC01動作説明
●動作のしくみ
変換基板回路
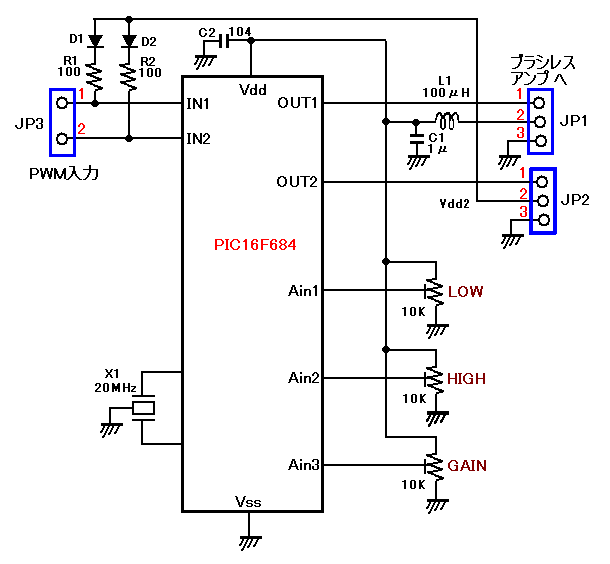
変換基板の回路を示す。全ての処理はPIC16F684が受け持つ。
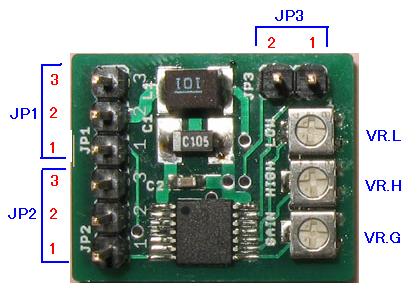
JP3がPWM入力で,JP1とJP2はブラシレスアンプに接続する。
トリマ Low/High/Gainは各種動作値を設定する。以下参照
D1/D2はPIC書き込み時に必要なスイッチであり,本回路の動作とは直接関係ない。
PWM信号とサーボパルス
ブラシレスアンプはサーボパルス入力によりブラシレスモータの回転を制御する。
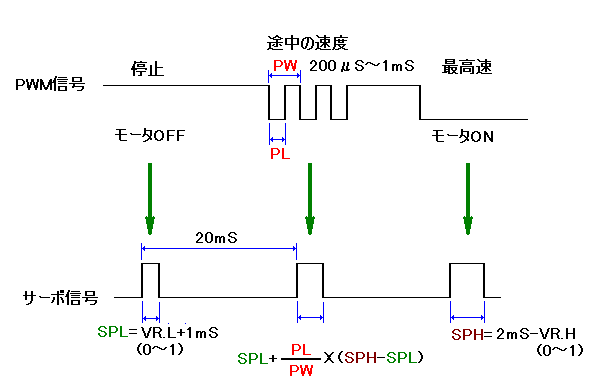
入力サーボパルスは20mS周期であり,パルス幅は1〜2mSある。
パルス幅1mSのときブラシレスモータは停止し,2mSのとき最高回転で回る。
PWM信号は200μ〜1mS程度(機種により異なる)のスイッチパルスである。
ON期間とOFF期間の比により,モータの回転速度を制御している。
ヒロボーXRBはやけに早く,200μ秒ごとに制御されている。
XRBは少し遅く400μ秒程度である。PWMの幅はモータの特性により各メーカごとに異なる。
モータ停止のときはPWMはOFFすなわちHになっている。
このときのサーボパルスは標準1mSである。
モータ最高回転のときのPWM信号は,ONすわわちLが続く。
このときのサーボパルスは標準2mSである。
途中の回転数は1mS〜2mSの間のパルス幅で表される。
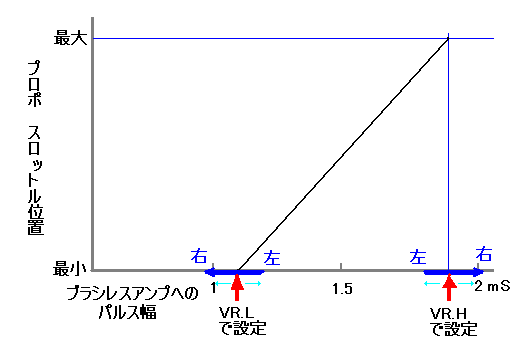
変換基板はPWM信号のHとLの比により,サーボパルス幅を計算する。
本来,サーボパルスは幅1mS〜2mSの間のパルスであるが,本変換基板はトリマにより下限と上限が調整できる。
トリマLOW(VR.L)により,停止時のパルス幅を調整し,
トリマHIGH(VR.H)にて,最高回転時のパルス幅を決定する。
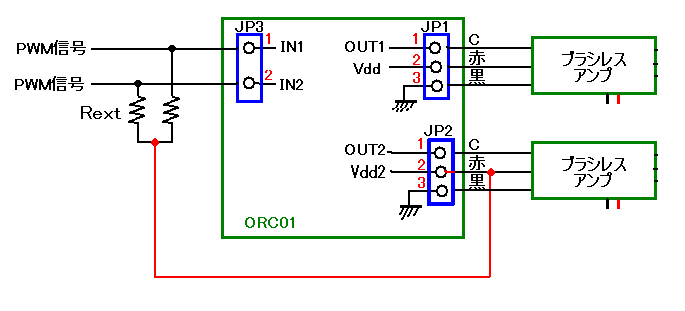
PWM信号入力
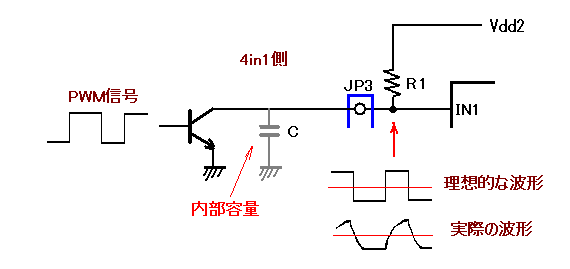
PWM入力回路には抵抗R1とR2がVdd2との間に挿入されている。
これは,4in1側のモータスイッチ回路の容量の影響をなるべく少なくするためである。
4in1側のモータスイッチ側の容量をCとすると,時定数は C・R1である。
すなわち,R1の値が大きいほど時定数が長くなり,PWM信号波形がなまる。
R1とR2が2個目のアンプの電源に接続されているのは,PIC書込みの問題であり,
本来はVddは1個のアンプから供給すべきである。
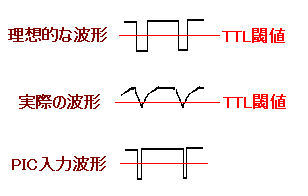
理想的なPWM信号波形は矩形波であり,どのレベルでデジタル化してもパルス幅は同じである。
ところが,容量分があり,R1が大きいと,積分された波形になり,
PIC入力回路によりデジタル化されたとき,パルス幅が変わってしまう。
これはPWMパルス幅が小さい(低回転時)のとき,より大きく影響を受ける。
PWMパルス幅はすごく小さいとき(かなり低い回転数)のときは,パルスが消えてしまう。
すなわち停止と同じ状態になってしまう。
これを避けるためには,なるべく低い抵抗でPWM信号を終端してやればよい。
が,小さ過ぎると電流が多く流れ,電池がもったいない。
抵抗のワット数の関係でORC01では100Ωを採用している。
E-SKYの場合,PWMスイッチ容量は極僅かであり100Ωで十分である。
ところが,ヒロボーXRBは容量が大きく100Ωでも足らないくらいである。
XRBでは,プロポのスロットルレバーが,停止から徐々に上げても,すぐにはモータは回転しない。
これは,プロポのスロットルカーブで調整する。
●接続方法
モータ線のPWM信号
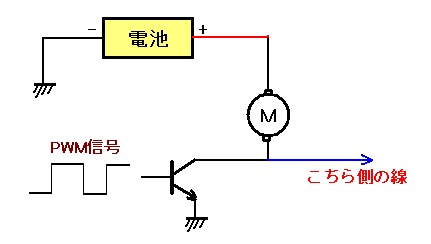
ほとんどの4in1受信機のモータドライブ回路は上図のようになっている。
モータに接続されている2本の線は片側が電池の+極であり,
もう片方がトランジスタに接続されているはずである。
このトランジスタ側の線からPWM信号を取り出す。
これはテスターで簡単に確認できる。
モータが停止中のとき,電池の-極からの電圧を測ればよい。
電圧0V側がトランジスタ側で,変換基板に接続する側の線である。
アンプを2個使う場合
ブラシレスモータを2個使う同軸反転ヘリの接続である。
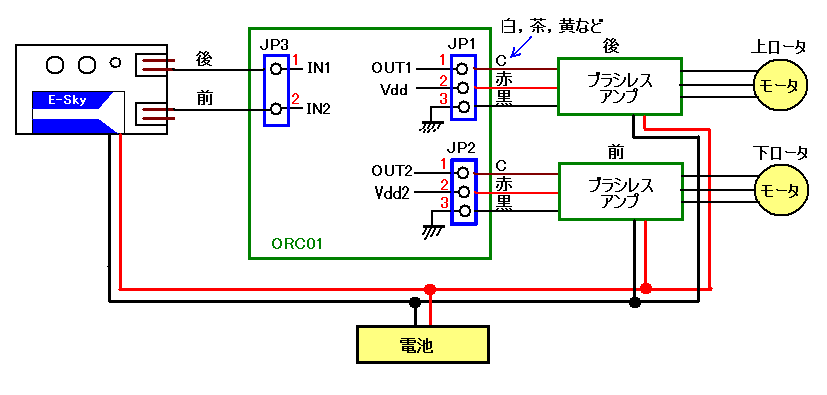
IN1-OUT1とIN2-OUT2は組になっているだけで,どちらが上側ロータでもよい。
変換基板の電源はブラシレスアンプから供給するので,必ずBEC付きのブラシレスアンプを使わなけらばならない。
アンプは2系統ともBEC電源を使用するが,内部で電源同士が接続されているわけではので,
少々アンバランスがあっても問題ない。
ブラシレスアンプ2個とオリジナルの4in1の3箇所にに電池から電源を供給する。
ブラシレスアンプとモータの3本の接続方法によりモータの回転方向が決まる。
回転が逆なときは任意の2本を入れ替えればよい。
E-SKYもXRBも下側が右回転である。
アンプを1つだけ接続する場合
シングルロータ機で,ブラシレスアンプを1個だけ使う場合の接続である。
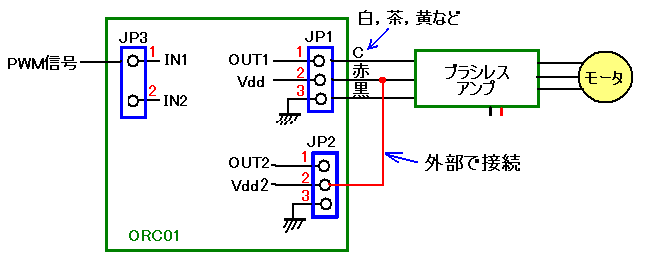 抵抗R1,R2に電源を供給しなければならないので,必ず外部でJP1-2とJP2-2を接続する。
抵抗R1,R2に電源を供給しなければならないので,必ず外部でJP1-2とJP2-2を接続する。
電池を2個使う場合
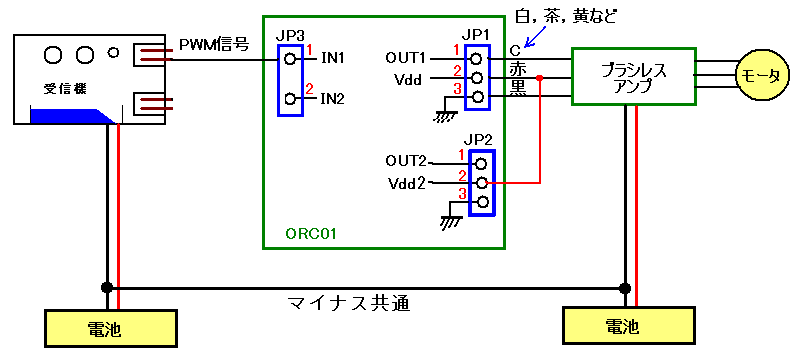 実験段階で受信機とアンプの電池を別々に使うときは,必ずマイナス側を共通にしなければならない。
実験段階で受信機とアンプの電池を別々に使うときは,必ずマイナス側を共通にしなければならない。
受信機のグランド(マイナス)が変換基板に入らないので,結果としてPWM信号が変換基板に入力されない。
負荷抵抗を増やす
プロポのスロットルの遊びが大きい場合は,PWMスイッチ回路の容量が大き過ぎることが考えらる。
外部に100Ωより小さい値をつけて時定数を小さくすることができる。
●調整
変換基板には,3つのトリマがついていて,動作パラメータを設定できるようになっている。
使用している4in1の特性により,適度に調整する。
HIGH/LOWトリマ
サーボパルスの幅を決めるトリマである。
LOWは停止時のパルス幅を調整する。
右一杯が一番パルス幅が小さい状態でモータは完全停止状態である。
徐々に左に回すとパルス幅が大きくなり,モータを回転を始める。
電源を入れて,ゆっくり左に回すとモータが回転し始める。
その少し手前で止めるのがよい。
電池の消耗により位置が変わるのでギリギリの設定はしない方がよい。
調整中はいきなりモータが回転し始めるので注意してください。
HIGHは最高回転のときのパルス幅を決める。
右一杯がモータの最大回転数であり,左に回すとパルス幅は小さくなり,
モータの最高回転数が抑えられる。
使用するモータの回転数により決定する。
室内で飛ばす場合は,抑え気味にしておいた方が事故は少ない。
GAINトリマ
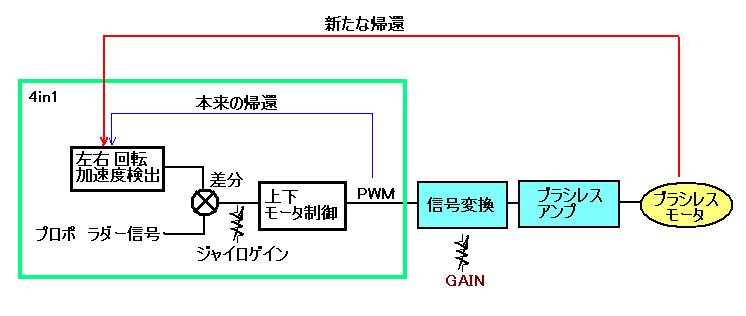
オリジナルの4in1の中のジャイロは,自分自身がPWM信号を制御してラダーを停止するような負帰還回路となっている。
ところが,新たに信号変換とブラシレスアンプを増やしたために,遅れが生じたり,駆動力が異なるため,
4in1が支持しているPWM信号どおりに機体は動作してくれない。
そのため,ラダーがぴったりロックしないという現象が起こる場合がある。
4in1が30%の力で回そうとしているのに,モータを強力にしたため,50%の力が出たりすると,
ジャイロによるラダーロック調整が狂うのである。
これは,プロポのスロットルカーブで最高回転を調整したときも起こりうる。
大抵の場合は,本体4in1のジャイロ感度を調整するとロックしてくれる。
本変換基板ORC01では,上下PWM信号の差により,ラダー信号を抽出してGAINトリマにより,
ブラシレスモータの回転数を制御している。
右に回すほど,GAINを下げる働きが強くなる。
E-SKYは本体のジャイロ感度調整のみで全く問題ないので左いっぱい(すなわちGAIN調整ゼロ)でよい。
ヒロボーXRBの場合は少し苦労する。
4in1側がいろいろと小細工をしてるので,真ん中位までGAINトリマを上げる。
さらに,HIGHトリマを少し絞った方がラダーはロックしやすくなる。
PICの書込み
 本基板はヘッダーピンを通して書き込めるように設計されている。
本基板はヘッダーピンを通して書き込めるように設計されている。
ただ,今回はヘッダーピンを実装せずにPICを書込むため,基板のパターンを挟み込む治具を作った。
もし,この基板のプログラムを書き込むための詳細な情報が欲しい人はメールください。
回路をお送りします。
試験風景
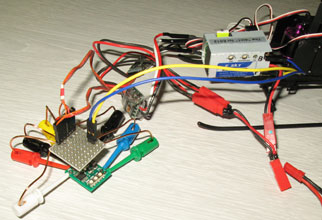 このまま飛ばすわけにはいかないけど,両方のブラシレスモータが正常に回ることと,
3つの調整ボリュームが正しく動作していることを確認している。
このまま飛ばすわけにはいかないけど,両方のブラシレスモータが正常に回ることと,
3つの調整ボリュームが正しく動作していることを確認している。
▲ラジコン・ヘリTOPへ