ブラシレス E-sky 第2版

新たにE-SKY Lama V3を購入し,まっさらの状態で,ブラシレス化してみた。
今回は,アウターロータ型の C1826/10 KV2400 を使ってみた。
C1826の取り付け方法
C1826はFG-1230より軽くて小さいが,直径が大きい。
E-SKYのフレームにギリギリ入るサイズである。
なにしろ外側が回転するので,サーボやフレームに接触してはいけない。
取り付け方法をいろいろ考えた結果,モータ側に新たにネジを切り,
下側から1.5mmのビスで,固定することにした。
モータの加工
 適当な位置に,1.2mmのピンバイスで穴を開ける。
適当な位置に,1.2mmのピンバイスで穴を開ける。
このとき,1mmで位置取りのため少し凹ましておくと作業がしやすい。
1個だけはピンバイスで開けたけど,後はボール盤を使いました。
ボール盤が無くても根性で開けることができます。
 もともと空いてたネジ穴の部分のミミを切り落とす。
もともと空いてたネジ穴の部分のミミを切り落とす。
これで,E-SKYのフレームに接触なく取り付けることができる。
先に開けた1.2mm穴に,1.5mmのネジをねじ込む。これでネジが切れる。
シャフトの延長
 C1826の2mmシャフトは短い。
C1826の2mmシャフトは短い。
純正の8Tピニオンを使った場合,
下側のギアにはなんとか届くが,
上側のギアには5mmほど寸法が不足している。
RCカーの2mmシャフトがちょうどよさげだったが,メッキしてあって,その分径が大きくて,
モータのベアリングに入らなかった。
ちょうど,E-SKYのインナーシャフトが2mm。
残念なんがら,モータシャフトより0.02mm径が小さい。
ま,許容範囲ということで,これを35mmに切って使った。
 ベアリングのガタは問題ない。
ベアリングのガタは問題ない。
ピニオンが少しゆるいので,瞬接を流し込んで固定。
フレームへの取り付け
 ギアの噛みあいを調整して,取り付け位置を決め,フレームに1mmのピンバイスで印をつける。
ギアの噛みあいを調整して,取り付け位置を決め,フレームに1mmのピンバイスで印をつける。
その後,1.6mmのピンバイスで,フレームに穴を開ける。
長穴にしたら,ワッシャが必要になる。


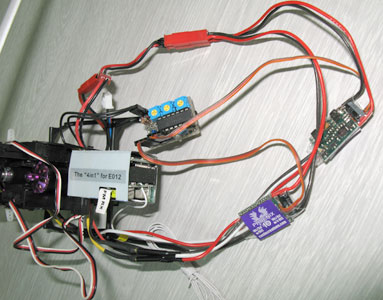
実際の配線
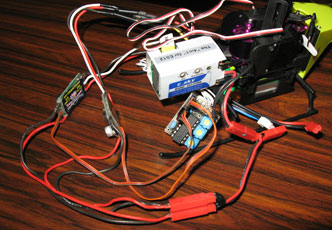
配線は
E-SKYブラシレス第1版
と全く同じである。
変換基板とブラシレスアンプを接続する。
飛行実験
まず,少し大きめのThunderbird-9を使ってみた。
残念ながら,低回転領域でトルクが出ない,どうも脱調してるようだ。
次に,HobbyWing Pentium 6A を使用。
低回転領域は,Timing を Midumに設定したときが,一番スムーズに回った。
高回転は,全く問題ない。F-1230よりパワーがあり,手持ちで回すと,もぎ取られる勢いである。
6Aのアンプなのでフルの性能は出ていない。10Aのアンプを使うともっと出力が出るだろう。
ブラシレスLAMA Ver.2 初飛行
調子にのって,くるくると回ってみた。
ブラシレスLAMA Ver.2 初墜落
操縦者小野君の名誉のために書いておくが,
これは操縦ミスではなく,急にパワーが無くなり墜落したところである。
ブレードを交換して,さらに飛行実験は続く
ブラシレスLAMA なんとか飛んでる
やっぱり,このままでは,低回転領域で不安定なので,部屋では飛ばせない。
ピニオンギア交換
2mmのピニオンギアは,ミニッツレーサ用が各種入手できる。
ところが,探してみると,ほとんどがナイロンギアで歯長が長い。
ミニッツはドライブギアとの距離がけっこうあって,モータシャフトがかなり長い。
京商のは6Y,7T,8Tとセットで500円と安いが,ボス付きでギア部分がφ1.2で,ボス部分がφ1.8程度。
これではE-SKYには構造的に実装できない。
ギアの加工
 もう1種類,白い歯長の長いボスなしナイロンギアがあったので,
これを加工して使うことにした。
もう1種類,白い歯長の長いボスなしナイロンギアがあったので,
これを加工して使うことにした。
とりあえず,2mmのシャフトに仮付けする。
 ボール盤に取り付けて,1/3程度のところをノコギリで切断。
ボール盤に取り付けて,1/3程度のところをノコギリで切断。
これでE-SKYに実装できる歯長になった。
モータシャフトに叩きこむが,やはりナイロン製なので勘合がゆるい。
かと言って瞬接は効果が薄い。やはり真鍮製を探すほうがよい。
モータ取付穴,長穴加工
 8Tでモータ取付穴位置を決めたので,長穴加工してモータ軸を移動調整できるようにする。
8Tでモータ取付穴位置を決めたので,長穴加工してモータ軸を移動調整できるようにする。
赤○は元のままのφ1.6のままで,ここ中心にモータ台座が回転するように,他の2つの穴(黄色○)を長穴加工する。
1.6mmのドリル歯をピンバイスに付けて,ヤスリのように削ると長穴になる。
 慎重にバックラッシュを調整する。
慎重にバックラッシュを調整する。
8Tに比べて,だいたい0.5mほど中に入る。
飛行実験 No.2
何度もバラしたり組み立てたりしてると,かな慣れてフレーム関連は10分もあれば組み付けれるようになった。
スキッドとテールは,二人でやった方が格段に早い。
C1826回転試験
まず手持ちで回転の調子を見る。
下側のモータが極低回転でバラつく。ギアの噛み合い強さは上下とも全く同じに調整してるので,
これはモータのバラツキと思われる。(アンプではない。)
 最高回転数で5分連続運転して,温度を測定してみた。
最高回転数で5分連続運転して,温度を測定してみた。
流石にアウターロータはよく冷える。
後ろ側で43度,前側も同じ程度だけど,キャノピーを付ければ,もう少し上がるかもしれない。
どちらにしても,リポ電池の方が熱いくらいである。
高回転のときも脱調気味
連続回転試験のときに気が付いたのだが,高速回転でも,時々,ほんの短い時間,回転が遅くなる。
手で持っていないと分からないくらいで,飛行には影響ない程度だ。
これはモータの問題か,アンプの問題か分からない。
もう少し設定が豊富なPHONIX-10だともっとよい結果になるかもしれない。
そのうち実験します。
ギア脱落事故
実は最初の飛行のときギアが少し抜けた状態だった。
ま,いっか,ということで飛ばしたら,案の定,途中で脱落。
無事優雅に飛行成功
ナイロンギアを再度叩きなおして,気休めに瞬接を少し流し込んで再トライ。
今度は調子よく飛んでくれた。
このビデオの後,何度か飛ばしたけど,問題は起きなかった。
ピニオンギアについて
まだ,少し低回転でトルク不足気味なので,真鍮製の6Tがよいと思われる。
軸径2mmの6Tは作れないことはないだろうけど,なかなか見つからない。
ボス付でも真鍮製なら,ボスを細くすれば使える。
ナイロン製の7Tでもなんとか使えると思う。
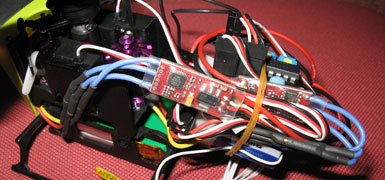
PHOENIX-10
結論から言うと,PHOENIX-10を使ったら,非常にスムーズに回転した。
 PHOENIX-10は10Aのアンプであるが,それほど大きくない。
PHOENIX-10は10Aのアンプであるが,それほど大きくない。
コネクタさえ付けてしまえば,簡単に入れ替えできる。
設定
USB設定ボードが無かったので,プロポでやった。
E-SKY Lama V3のエレベータやエルロン出力は使えなかった。サーボパルスの高が出ていないように思われる。
別途受信機を用意してそれで設定。これが大変。USB設定ボードを使ったほうがよい。
設定1.オートカット電圧 Option=1 標準(5V) これは高すぎると思われる。
設定2.過大電流保護 Option=3 標準
設定3.ブレーキ種類 Option=5 (なし)
設定4.スロットル範囲 Option=2 (固定範囲指定)
設定5.タイミング Option=1 (進角高)
設定6.オートカット Option=2 (ソフト)
設定7.ソフトスタート Option=3 (高速)
進角高に設定してるので,効率が悪く電池の消耗が激しい。
ちょっと問題あるかも。
もう少し考える必要ある。
飛ばしました

進角標準で脱調して墜落
最初は進角標準でトライ。だいたい順調だけど,ときどき脱調する。
感覚的にはPentium 6AのMidumと同じ。
進角高で順調ホバリング,オートカットで着陸
進角高に設定すると,今まででは見たこと無いくらいスムーズに回転しはじめた。
今までモータのバラツキで,ラダーのトリムが右一杯でもまだロックしなかったのだけど,
きっちりロックするようになった。
考察
C1826を使う長所と短所
・軽くて高出力。ただし,6Aのアンプを使うとY12Lに比べてそれほど大きいわけではない。
・アウターロータ型なので放熱は非常によい。5分連続最高回転で43度
・軸径が2mmなのでピニオンが入手しやすい。ただし,実装できる6Tは探せていない。
・軸長が短いので軸を交換しなければならない。同じ太さの軸が入手できない。
・直径が大きく,外側が回転するので,取り付けに10倍手間がかかる。
・アンプを選ぶ。PHOENIX-10しか動作するアンプが見つかっていない。
ブラシレスモータ考
今回,インナーとアウターと2種類のモータを実験した。
インナーロータ型はどちらも4100KVで,アウターロータ型は2400KVである。
当初は,室内ヘリはそれほど高回転ではないので,2400KVの方が成績がよいだろうと考えていた。
ところが,結果は全くの逆で,インナー型のFG1230とY12Lの方がはるかに使いやすい。
KV値というのは,1Vあたりの回転数であり,そのときのトルク特性には無関係みたいだ。
KV値が低いから,低回転でトルクがあるとは限らない。
むしろ,回転子が軽いインナー型の方が低速トルクがあるようだ。
ヘリには,どうやらインナー型が使いやすいというのがORCの結論である。
▲ラジコン・ヘリTOPへ