ブラシレス ヒロボーXRB<

ブラシレス化計画
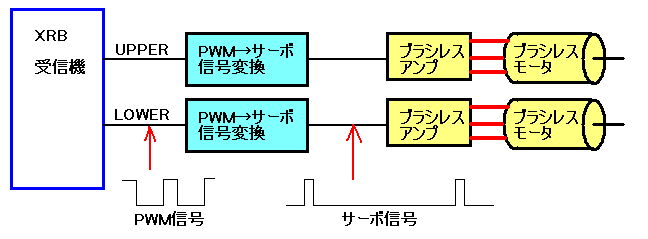
XRBの受信機から出力されるモータ駆動信号は,PWM信号である。
この信号では直接ブラシレス・アンプを駆動できない。
そこで,PICマイコンによりサーボ信号に変換してやる。
これでバッチリうまくいくはずだ。
XRBブラシレス化に必要なもの
・PWM変換基板
ブラシレスアンプ
Dualsky 6A XC0610BAもしくはHobbyWing Pentium 6A
ブラシレスモータ
Feigao FG-1230 KV4100もしくはHyperion Y12L/4100
ピニオンギア
XEBのコアレスモータのがそのまま使える。
PWM変換基板と4in1受信機と接続する線
 QIコネクタで作るか,直接半田付け。
QIコネクタで作るか,直接半田付け。
4in1受信機,ブラシレスアンプに電源を供給する分岐コード
 JSTコネクタで作るか,直接半田付け。
JSTコネクタで作るか,直接半田付け。
必要な部品はORCにて頒布してます。⇒
ORC SHOP
ブラシレス化の実際
PIC基板の作成
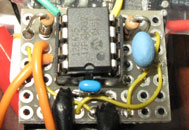 まずは手配線で小野君が作ってくれた。
まずは手配線で小野君が作ってくれた。
ソフトも小野君作成。
8ピンのPIC1個で2個の信号を変換してくれる。
ORCで作成したプリント基板 ORC01を使えば,作らなくてよい。
実際の配線は,
ブラシレスE-Sky
と同じである。
モータの選択と取付
 それほど高出力のモータは必要ない。どちらかと言うとKV値の小さなモータがよい。
ところが,小型のインナーロータのモータは少ない。さんざん探したあげく
ロビンで購入した,
Feigao FG-1230 KV4100とHyperion Y12L/4100
を使って実験することにした。
それほど高出力のモータは必要ない。どちらかと言うとKV値の小さなモータがよい。
ところが,小型のインナーロータのモータは少ない。さんざん探したあげく
ロビンで購入した,
Feigao FG-1230 KV4100とHyperion Y12L/4100
を使って実験することにした。
XRBにはFG-1230を取り付ける。(もちろんHyperionでも動作した)
取り付け金具のネジ穴が合わないので,新たに開けなおす。
後はモータ交換の容量で割りと簡単に取り付けることができる。
アンプの選択と取付
 5A程度のモータなので,小出力のアンプでよい。
5A程度のモータなので,小出力のアンプでよい。
ロビンより,Dualsky 6A XC0610BAを購入する。
アンプは機体の前と後ろに分けて,テープで取り付ける。

アンプの設定
 ほとんどのアンプは,プロポで初期設定をすることができる。
ほとんどのアンプは,プロポで初期設定をすることができる。
設定ボードを用意すると,設定状態が目視確認できるので便利である。
いろいろと設定を変えてみたけど,あまり変化はなかった。
多分,KV値が大きすぎるんだろう。
初飛行
だいたい動いたので,さっそく初飛行。
初飛行ビデオ
ちょっとラダーが安定してないけど,なんとか飛ばせる。
とにかく,凄いパワーなので,スロットルのレバーは少ししか動かせない。
ちょっと気を抜くと天井に激突しそう。
このへんは,JRプロポのソルットルカーブを調整して逃げる。
電池の消耗とモータ温度
 ガンガン飛ばして,600mAHのリポ電池で10分程度飛行できる。
重量は十分余裕があるので,もっと大容量の電池を積めば,長時間飛行が可能である。
ガンガン飛ばして,600mAHのリポ電池で10分程度飛行できる。
重量は十分余裕があるので,もっと大容量の電池を積めば,長時間飛行が可能である。
10分飛行後のモータ温度を測定した。
ぜんぜん余裕がある。ブラシレスにしては,あまり電流を流してないので冷える。
有り余るパワーで激しく舵を切るビデオ
とにかく凄いパワー。少々機体が傾いても修正できる。だが調子に乗りすぎると激突する。
ラダーの振動
ホバリング時にラダーがブルブル震える。
一般的にはジャイロの感度が高すぎるのが理由である。
ところが,ヒロボーXRBのジャイロ感度と称するトリマは,
どうやらラダーの回転速度のみにしか効かないようだ。
因みにE-Skyの方は,ジャイロ感度の調整だけでラダーは落ち着いた。
パワーを落とすと,かなりマシになる。そこで,
どうせパワーは余裕があるので,一つ小さい,Feigao FG-1220 KV5250に
交換してみた。KV値は5250しか入手できなかった。
飛ぶには飛んだけど,少々パワー不足かな?
それとも,KV値が大きすぎるのかもしれない。
それに,ラダーの振れもそれほど変わらない。
結局,元に戻した。
どうも,通常のブラシレスアンプでは,
最低回転のパルス幅と最高回転のパルス幅の設定ができないようだ。
プロポのスロットルカーブで設定するのも手である。
E-Skyの場合はこれで問題は出ない。
ところが,ヒロボーXRBの場合,受信機の指令と合わないと,
ジャイロがうまく動作してくれない。
さらに,PWMからサーボパルスに直すときのゲインを少し上げ気味にすると,
すなわち,負帰還系のループゲインを上げてやると,ラダーの振れはピタリと止まった。
新しいPIC基板
 最初はPICプログラムに値を書き込んで実験していたが,
どうも面倒である。
最初はPICプログラムに値を書き込んで実験していたが,
どうも面倒である。
で,ある日,小野君の命令により,
14ピンのPICを使い調整用の半固定抵抗を3個つけた新しいPIC基板を作った。
半固定抵抗が大きいので7.1gもある。
もっとも,パワーの有り余るブラシレスXRBでは問題にならない。
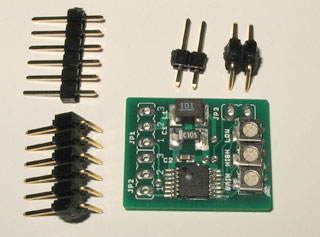
新基板ORCC01
結局,この回路を最終として,基板を起こした。
PICその他の部品は全て表面実装タイプで,かなり小さくまとまっている。
詳細は
変換基板ORC01マニュアル
を参照されたし。
この基板に載せ替え,ラダーのゲインを調整すると,ほぼもとのとおりの安定を取り戻す。
ブラシレスXRB安定飛行ビデオ
最近,シングルロータにかかりきりでしたが,久しぶりに飛ばしてみました。
やっぱり同軸反転は安定してますね。それにこのパワー。いいです。
ブラシレスXRB旋回と着陸ビデオ
▲ラジコン・ヘリTOPへ