Walkera QR Scorpion

WalkeraのY型
掲示板で新しいWalkera UFO型を紹介していただき,早速,
MyHobbyJapan
に注文した。
かつて,UFO型は,
UFO#8
があった。ただし,あまり安定性はよくなかった。
その頃から比べて,ジャイロセンサーも傾きセンサーも格段の進歩を遂げている。
 Scorpoinは,かなり小さい。
左が
UFO#8
で,右がScorpoinである。
Scorpoinは,かなり小さい。
左が
UFO#8
で,右がScorpoinである。
こうして比べると面積では半分以下である。
小さいと安定性に欠けるのが普通だが,安定度は
UFO#8
より格段によい。
 内部はかなりスッキリしている。
内部はかなりスッキリしている。
CPUと3軸ジャイロセンサが見える。
6個のモータがこの基板1枚で制御されている。もちろんメカなし。
凄いぞぉ〜Walkera
DEVO6とのペアリング
 BNFを購入したので,以前,
GeniusCP
のときに付属してきたDEVO6とペアリングさせる。
BNFを購入したので,以前,
GeniusCP
のときに付属してきたDEVO6とペアリングさせる。
まず,Aをタッチして,新しいモデルMODEL2を選択する。
Bをタッチして,Model Name をタッチし,モデル名をScorpoinに変更する。
これで,いったん電源を切る。
機体側の電池をつないで,再度DEVO6の電源を入れるとペアリングは完了する。
 ちょっとホバリングしてみたら,かなりシビアである。
室内では舵が切れ過ぎる。
ちょっとホバリングしてみたら,かなりシビアである。
室内では舵が切れ過ぎる。
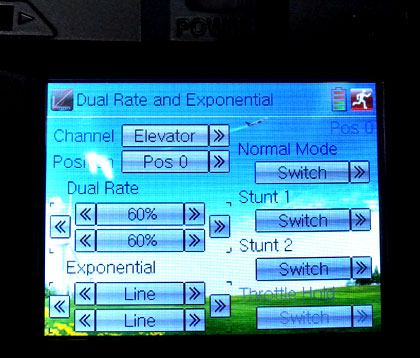
DEVO6メイン画面のCをタッチすると,DRの設定画面になる。
ElevatorとAileronをそれぞれ60%に設定した。
 DEVO6を調整しようとして,調整用ペンを本体から外すとき,
固くて爪が折れそうになるのはORCのだけじゃないだろう。
DEVO6を調整しようとして,調整用ペンを本体から外すとき,
固くて爪が折れそうになるのはORCのだけじゃないだろう。
バネでガッチリ止まってる。
タッチパネルが割れる程の衝撃でも,調整用のペンだけは絶対に本体から落ちない様に考えられている。
このへんは非常にWalkeraらしい。
さて,さて,調整の度に爪が削れるのも嫌なんで,少し柔らかくする。
左側の写真の赤矢印の部分を紙ヤスリで削り,段差を小さくするとよい。
初飛行
 Walkera QR Scorpoin ノーマル・モード 初飛行
Walkera QR Scorpoin ノーマル・モード 初飛行
GEARスイッチ1で赤LEDが点灯し,6軸ジャイロモードとなる。
3軸ジャイロモードに加え,傾きセンサが姿勢制御してくれる。
流石傾き制御の効果は大きくWalkeraらしくて操縦し易い。
前の
GeniusCPの6軸モードに比べてかなり進化している。
レスポンスは無茶苦茶よく,プロポがしょぼくなかったら,もっと操縦しやすい。
DEVO6のスティックは使いにくく,前のWK24xxの方がはるかによかったと思う。
Walkera QR Scorpoin ローリング・モード 初飛行
GEARスイッチ0で緑LEDが点灯し,
傾きセンサの制御がOFFになり,3軸ジャイロモードとなる。
まだまだ安定しているが,移動後の立て直しが難しい。
確かに,
UFO#8
の操縦性に似ている気がする。
Walkera QR Scorpoin あっ痛ぁ!
調子に乗ってグルグル旋回してると,一瞬,方向を見失い,ブチ当たった。
その結果が↓である。
 ブレードが1個曲がってしまった。
ブレードが1個曲がってしまった。
指で丁寧に元に戻し,ガタのないのを確認する。
ちょっとブレードに皺がいってるけど,問題なく飛行できる。
つづくかも?
▲ラジコン・ヘリTOPへ