WALKERA 4G3
 挷惍儅僯儏傾儖奣梫
挷惍儅僯儏傾儖奣梫
偼偠傔偰偺壜曄僺僢僠
ORC偵偲偭偰丆弶偺壜曄僺僢僠丒僿儕偱偁傞丅悘暘慜偐傜梊栺偟偰丆
傑偲傕偵旘偽偣傕偟側偄偺偵丆崱偐崱偐偲懸偭偰偄偨丅
Jade store (REMOTO CONTROL HELICOPTERS)偐傜梊掕傛傝憗偔憲偭偰偒偨丅
 僱乕儈儞僌偐傜偡傞偲丆4#3A偺壜曄僺僢僠斉偐偲巚偭偰偄偨偑丆
偐側傝戝偒偔暿暔偱偁傞丅
僱乕儈儞僌偐傜偡傞偲丆4#3A偺壜曄僺僢僠斉偐偲巚偭偰偄偨偑丆
偐側傝戝偒偔暿暔偱偁傞丅
嫟捠晹昳偼丆僒乕儃偔傜偄偐側丠

 壜曄僺僢僠偺僿僢僪偼丆偐側傝惛搙傛偔偱偒偰偄傞丅
壜曄僺僢僠偺僿僢僪偼丆偐側傝惛搙傛偔偱偒偰偄傞丅
僗儚僢僔儏僾儗乕僩傕嬅偭偨嶌傝傪偟偰偄傞丅
偄傗偀丆惁偄偧偋乣儚儖働儔両
6ch.僾儘億
 傕偪傠傫僾儘億傕怴偟偔偰6ch偱偁傞丅ORC偵偼傕偪傠傫偙傟1戜偟偐側偄丅
傕偪傠傫僾儘億傕怴偟偔偰6ch偱偁傞丅ORC偵偼傕偪傠傫偙傟1戜偟偐側偄丅
偲尵偆偺偼丅丅丅丅
嵟弶丆揹抮傪擖傟偰傕僾儘億偺LED偑揰柵偟側偐偭偨丅
揹尮偑ON偵側傜側偄偺偱偁傞丅
偍傑偗偵丆崱夞偐傜僾儘億偺働乕僗偑晻報偝傟偰偄傞丅
偙傝傖偁戝曄偩
偲傝偁偊偢丆Jade偵揹尮擖傜側偄巪傪儊乕儖偡傞丅
偙偙偼垽憐偑埆偄丅偩偄偨偄曉帠偔傟側偄丅
柧擔傑偱懸偭偰曉帠偑棃側偐偭偨傜僾儘億傪奐偗偰傗傠偆偲寛怱偡傞丅
偲偙傠偑丆
摨偠僋儗乕儉偑嶳傎偳擖偭偨偺偐丆
崱夞偼偡偖偵曉帠偑棃偨丅
偙偺儁乕僕傪嶲峫偵偟偰丆
僾儘億傪奐偗偰丆揹抮偺僐僱僋僞傪愙懕偟偰偔傟丆偲偺偙偲丅
妋偐偵奐偗偰傒傞偲丆揹抮偺僐僱僋僞偑敳偗偰偄傞丅
偙偺曈偑Walkera傜偟偄丅
僐僱僋僞傪憓偟偨傜柍帠揹尮ON偱丆儁傾儕儞僌傕姰椆丅
偝偀乣旘偽偡偧偋
偄偒側傝捘棊
壗傕挷惍偣偢偵丆乮偲尵偆偐挷惍曽朄傪抦傜側偄丅丅丅丅乯
僩儕儉傕崌傢偣側偄偱丆柍杁偵傕弶旘峴丅
 弶旘峴偱捘棊丅僽儗乕僪攋懝丅
弶旘峴偱捘棊丅僽儗乕僪攋懝丅
偲偄偆丆摉慠偲尵偊偽丆摉慠偺寢壥偵側偭偨丅
壌偺偁傆偋乣
 4#3偺偲偒偼丆僽儗乕僪側傫偰妱偭偨偙偲偑側偐偭偨偑丆4G3偼偄偲傕娙扨偵妱傟傞丅
4#3偺偲偒偼丆僽儗乕僪側傫偰妱偭偨偙偲偑側偐偭偨偑丆4G3偼偄偲傕娙扨偵妱傟傞丅
偦傟傕偦偺偼偢丅
4G3偺僽儗乕僪偼敪朅僗僠儘乕儖傪敄偄庽帀偱屌傔偨嬅偭偨嶌傝偱偁傞丅
傛偔尒傞偲丆拞偵僇乕儃儞丒僼傽僀儖僶乕偺恈偑擖偭偰偄傞丅(揝偩偲巚偭偨傜堘偭偨)
偙傝傖偁屌偄偼偢偩傢丅
摉偭偨傜捝偦偆丅丅丅丅價僨僆偲傞偺傕柦偑偗丅丅丅丅
偦傟側傝偵嫮偦偆偩偗偳丆抂偼娙扨偵愜傟傞丅
偙傝傖偁戝曄偩丅僽儗乕僪戙偑偐偝傓丅
僽儗乕僪偼1慻梊旛偑偁傞丅偲偵偐偔2枃偲傕岎姺偩丅
偑丆偦傟埲忋偼傑偩攧偭偰偄側偄丅棃廡偐傜斕攧丅$5偩丅


偲巚偭偨傜丆4G3偺僷乕僣偼摉暘柍偄傒偨偄偩丅(Jade偺HP偑曄峏偝傟偰偄傞)
偟傚偆偑側偄偺偱丆妱偭偨僽儗乕僪傪廋棟偡傞丅
3暘峝壔宆偺僄億僉僔愙拝嵻偱偑偭偪傝屌傔傞丅
 幙検偺戝偒側僽儗乕僪偑崅懍夞揮偟偰傞偩偗偁偭偰丆僽儗乕僪偺僶儔儞僗偵偼偡偛偔晀姶偱偁傞丅
幙検偺戝偒側僽儗乕僪偑崅懍夞揮偟偰傞偩偗偁偭偰丆僽儗乕僪偺僶儔儞僗偵偼偡偛偔晀姶偱偁傞丅
僽儗乕僪傪曗廋偟偨傜丆昁偢僶儔儞僗傕偲傜側偄偲偄偗側偄丅
愙拝嵻傪儎僗儕偱嶍傝棊偲偟偨傝丆僥乕僾傪揬偭偰摦揑僶儔儞僗傪偲傞丅
僩儕儉挷惍
偣傔偰丆僩儕儉偔傜偄偼偪傖傫偲崌傢偣傛偆丆偲丆彫栰孨偑挷惍偟偰偔傟偨丅
Walkera 4G3 僩儕儉挷惍偺柾條
側傫偐丆4#3B偵斾傋傞偲帺棫埨掕惈偑嬌抂偵掅偄丅
偄傗丆偦傕偦傕丆壜曄僺僢僠偺3D僿儕偵帺棫埨掕惈傪媮傔傞曽偑娫堘偭偰傞偺偐丠
僩儕儉挷惍傕廔偭偰丆偩偄傇壜曄僺僢僠偺憖廲姶妎偵傕姷傟偨偺偱丆儂僶儕儞僌偟偰傒傞丅
Walkera 4G3 庤帩偪敪恑偲儂僶儕儞僌
Walkera 4G3 庤帩偪敪恑偲儂僶儕儞僌乮崅夝憸搙:QuickTime偑昁梫偱偡乯
崱傑偱偺摦夋宍幃偼SONY愱梡偱偟偨丅偡偄傑偣傫丅
傗偭傁傝丆側傫偐晐偄丅摦偒偑媫偡偓傞丅
偪傚偭偲恀柺栚偵挷惍偣傫偲丆憖廲偱偒側偄偲偄偆偙偲偑丆傗偭偲暘偐傞丅
僺僢僠挷惍
挷惍曽朄偼偙偺HP偺庯巪偱偼側偄偑丆僺僢僠挷惍偔傜偄偟側偄偲丆傑偲傕偵旘偽側偄傛偆偩丅
奆條偺彆尵傪摼偰丆偲傝偁偊偢揔摉偵傗偭偰傒傞偙偲偵偟偨丅
 丂丂
丂丂

DIP僗僀僢僠偺No.11傪ON偵偡傞偲丆僾儘億偺塃忋偺V1偑嵟弶偺僺僢僠妏搙挷惍偱丆
V2偑僗儘僢僩儖傪忋偘偨偲偒偺僺僢僠壜曄搙崌偄偵側傞丅
V1傪5僋儕僢僋亄丆V2傪5僋儕僢僋亅曽岦偵夞偡偲丆屌掕僺僢僠僿儕偵嬤偔側傝丆
憖廲偟傗偡偔側傞丅
傫丠壗偺偨傔偺壜曄僺僢僠傗丅偲偐尵傢側偄偱丅丅丅
崱傑偱屌掕僺僢僠偟偐憖廲偟偨偙偲側偄偺偱丆壜曄僺僢僠僿儕偺僗儘僢僩儖偼偆傑偔偄偐側偄丅
婡懱偑忋偑偭偨偲偒丆僗儘僢僩儖傪峣傝夁偓傞偺偱偁傞丅
崱傑偱偼廳椡棊壓暘傪峫椂偟偰僗儘僢僩儖傪峣偭偰偄偨偑丆4G3偼峣偭偨暘丆慺捈偵崀壓偡傞丅
杮棃偼偙偪傜偺曽偑憖廲偟傗偡偄僴僘側傫偩偗偳丆偁偐傫!!!
忋壓偵僈僋僈僋偟偰偟傑偆丅
偙偺HP偺庯巪偱偼側偄偑丆偙傟偽偭偐傝偼楙廗偡傞偟偐側偄偐丠
Walkera 4G3 2夞栚偺敪恑偲僼儔僼儔旘峴
傗偭傁傝丆側傫偐挷惍偑敳偗偰偄傞丅
Walkera 僾儘億 WK-2601偼丆DIP僗僀僢僠偺愗懼偵傛傝丆
V1偲V2僩儕儅偺摥偒偑曄傢傝丆偄傠偄傠側挷惍偑壜擻偵側偭偰偄傞丅
DIP僗僀僢僠傪愗傝懼偊偰傕丆慜偺愝掕撪梕偼妎偊偰偄傞丅
僼僞僶傗JR偺僾儘億偺傛偆偵帇妎揑偱偼側偄偑丆堦墳堦捠傝偺愝掕偼偱偒傞傛偆偩丅
偪傚偭偲恀柺栚偵儅僯儏傾儖傪撉傕偆丅
3D儌乕僪
 塃忋偺僗僀僢僠傪忋偵忋偘傞偲丆3D儌乕僪偵側傝丆儘乕僞偑堦掕夞揮偵側傝丆
僽儗乕僪偺僺僢僠偼僗儘僢僩儖偺僙儞僞乕傪0偵偟偰丆+/-8搙壜曄偡傞丅
塃忋偺僗僀僢僠傪忋偵忋偘傞偲丆3D儌乕僪偵側傝丆儘乕僞偑堦掕夞揮偵側傝丆
僽儗乕僪偺僺僢僠偼僗儘僢僩儖偺僙儞僞乕傪0偵偟偰丆+/-8搙壜曄偡傞丅
偙傟偼晐偄両
堦搙傗偭偰傒偨偗偳丆夛媍幒偩偲價價僢偰偟傑偭偰丆寢壥偲偟偰彴偵挘傝晅偄偨丅
偙傝傖偁擄偟偄偧偋丅
側傫偐丆ORC偵偼曮偺帩偪晠傟偺傛偆側婥偑偟偰偒偨丅
揹抮儂儖僟乕
 儅僯儏傾儖偵傛傞偲丆僉儍僲僺乕傪奜偟偰揹抮傪庢傝晅偗傞偙偲側偭偰偄傞丅
儅僯儏傾儖偵傛傞偲丆僉儍僲僺乕傪奜偟偰揹抮傪庢傝晅偗傞偙偲側偭偰偄傞丅
3D僿儕側偺偱丆搑拞偱揹抮偑棊偭偙偪側偄傛偆偵攝椂偝傟偰偄傞偺偐丠
僉儍僲僺乕偺撪懁偵揹抮偺摢偑廂傑傞傛偆偵側偭偰偄傞丅
偲偙傠偑丆杔偨偪偵偼3D側傫偰掱墦偄偟丆偄偪偄偪僉儍僲僺乕傪奜偡偺偼柺搢偩丅
偦偙偱丆僉儍僲僺乕偺壓晹丆3mm傎偳愗傝崬傒傪擖傟偰丆愜傝嬋偘偨丅
偙傟偱僉儍僲僺乕傪奜偝偢偵揹抮偑庢傝晅偗傟傞丅
旘峴帪娫偲儌乕僞壏搙
4#3B偵斾傋偰廳偄偟丆儌乕僞傕戝偒偔側偭偰偄傞偺偱丆摨偠揹抮偩偲摉慠旘峴帪娫偼抁偔側傞丅
4#3B偱7..8暘旘傇掱搙偺屆偄揹抮偩偲丆1暘傕傕偨側偄丅
怴昳偺揹抮偑昁梫偩丅
傑偩僿僞側偺偱丆
傎偲傫偳怴昳偺揹抮偱丆儂僶儕儞僌帪娫傪寁應偡傞偲丆6暘30昩旘峴偱偒偨丅
3暘宱夁偡傞偔傜偄偐傜丆儔僟乕偑僘儗巒傔丆5暘宱夁屻埵偐傜丆
彮偟僒乕儃偺岠偒偑埆偔側傞偑丆4#3掱埆偔偼側偄丅
嵟屻偼丆傑傞偱僆乕僩丒僇僢僩僆僼偺傛偆偵僗僁乣偭偲夞揮偑棊偪傞丅
 3暘娫儂僶儕儞僌偟偨偲偒偺儊僀儞儌乕僞偺壏搙傪寁應偟偨丅
3暘娫儂僶儕儞僌偟偨偲偒偺儊僀儞儌乕僞偺壏搙傪寁應偟偨丅
偙偺偲偒偺幒壏偼24搙丅
63.1搙偲偄偆抣偼4#3傛傝偼擬偔側偭偰偄傞丅
恀壞偺弸偄晹壆側傜傕偭偲弸偔側傞丅
3D儌乕僪偺応崌偼丆傑偩寁應偱偒偰偄側偄丅偲偄偆偐3D儌乕僪偱旘傋側偄丅僩儂儂丅
傕傠傕傠偺挷惍
偄傠偄傠側恖偐傜丆壜曄僺僢僠婡偼儌乕僞夞揮悢偲僺僢僠偺娭學偑擄偟偄丅偲
傾僪僶僀僗傪庴偗丆僗儘僢僩儖丒僇乕僽偲僺僢僠丒僇乕僽傪偄偠偭偰傒偨丅
傕偪傠傫丆僺僢僠丒僎乕僕傕柍偄偺偱丆揔摉偩偗偳丆傑偀丆側傫偲偐儂僶儕儞僌偲慁夞偱偒傞
儗儀儖偵側偭偰偒偨丅
Walkera 4G3 挷惍?屻偺儂僶儕儞僌偲慁夞旘峴
僾儘億挷惍曽朄偼丆慡偔暘偐傜傫両
挷惍曽朄偼偙偺HP偺庯巪偱偼側偄偺偱丆
挷惍儅僯儏傾儖偺奣梫
傪彂偔偺傒偵偡傞丅偄傠偄傠嫵偊偰偔偩偝偄丅
僗儘僢僩儖丒僇乕僽傪愝掕偟傛偆偲偟偨傜丆DIP僗僀僢僠 No.10傪ON偵偟偰丆
儅僯儏傾儖捠傝傗偭偰傞偵丆偆傑偔愝掕偱偒側偄丅
嵟弶偼愝掕偱偒偰偨傛偆側婥偑偟偨偗偳丆棊偪拝偄偰尒偰傒傞偲丆傗偭傁傝摦偄偰偄側偄丅
偲尵偆偐丆Normal儌乕僪傕3D儌乕僪傕慡偔曄壔偟側偄丅側傫偱傗儚儖働儔丠
DIP僗僀僢僠 No.12偺僕儍僀儘姶搙偲儔僟乕崿崌斾傕摦嶌偟偰傞條巕偼側偄丅
偳側偨偐丆4G3傪峸擖偝傟偨曽偱丆偒偭偪傝愝掕偱偒傞偐偳偆偐偍嫵偊偔偩偝偄丅
暘偐傜側偄側傝偵丆傕傠傕傠偺僷儔儊乕僞傪挷惍偟偰傞偲丆
偩傫偩傫憖廲偟傗偡偔側偭偰偒偨丅夛媍幒傪廲墶柍恠偵旘偽偣傞傛偆偵側傞丅
 偑丆壗帠傕挷巕偵偺傞偲儘僋側偙偲偼側偄丅徴棫偵寖撍
偑丆壗帠傕挷巕偵偺傞偲儘僋側偙偲偼側偄丅徴棫偵寖撍
Blade Controller乮儀儖僸儔崿崌僶乕乯
偺儃乕儖偑晅偗崻偐傜2屄偲傕愜傟偰偟傑偭偨丅
偦傟傕柍拑嬯拑嵶偄丅廋棟偱偒側偔偼側偄偑丆偗偭偙偆戝巇帠偩傢丅
Walkera 4G3 挷巕偵偺偭偰徴棫偵寖撍
傗偭偲丆Jade偱晹昳偑拲暥偱偒傞傛偆偵側偭偨丅
夡傟偨晹昳偑棃傞傑偱偟偽傜偔偍媥傒
嵟嬤丆Jade偝傫丆偡偭偛偔垽憐偑傛偄丅
傑偝偐丆ORC偺HP傪撉傫偱傞傢偗偠傖側偄偩傠偆偄偗偳丆
儊乕儖偟偰傕丆偡偖偵曉帠偑曉偭偰棃傞丅
崱夞偺晹昳敪拲偱丆梉曽偵枹敪拲晹昳傪夡偟偨偺偱丆捛壛敪拲偟丆
偦偺巪儊乕儖偟偨傜丆摨帪偵憲傞偐傜憲椏$5傪曉媝偡傞丆偲婐偟偄偍曉帠丅
5暘傕偨偨側偄偆偪偵PayPal偵$5栠偟偰偔傟偨丅
偮偄偱偵丆岼偱塡偵側偭偰偄傞4G3 僽儔僔儗僗丒僉僢僩偵偮偄偰暦偄偰傒偨丅
偙傟傑偨丆偡偖偵曉帠偑偁傝丆
偄偢傟敪攧偝傟傞偑丆尰嵼Walkera幮偼朲偟偄偺偱丆偐側傝愭丆擭撪偼柍棟偲偺偙偲丅
08/11/22偵Jade偺扴摉幰偐傜儊乕儖偑偁傝丆
傑偪偑偄側偔丆4G3偺僽儗僔儗僗丒僉僢僩偼帋嶌姰椆偲偺偙偲丅
Walkera偺岺応偱尒偨偲丆尵偭偰傞丅
偨偩偟丆棃擭傑偱儕儕乕僗偡傞梊掕偼側偔丆儕儕乕僗梊掕偑寛傑偭偨傜嫵偊偰偔傟傞偦偆側丅
偝偁丆偳偆偡傞丠
Blade Controller偺廋棟
曗廋晹昳偼側偐側偐撏偐側偄偺偱丆儕儞僋儃乕儖傪曗廋偡傞偙偲偵偟偨丅
懠偺婡懱偱悘暘傗偭偰偒偨丆僺傾僲慄幉懪偪朄偱偁傞丅
 傑偢丆愜傟偨儃乕儖偺僔儍僼僩晹暘偵0.3冇偺僪儕儖偱寠傪奐偗傞丅
傑偢丆愜傟偨儃乕儖偺僔儍僼僩晹暘偵0.3冇偺僪儕儖偱寠傪奐偗傞丅
嵟弶偵恓傪擬偟偰丆僙儞僞乕傪墯傑偣傞偲恀傫拞偵奐偗傞偙偲偑偱偒傞丅
壗偟傠彫偝偄偺偱嶌嬈偟偵偔偄偑丆巜偵0.3冇偺寠偑奐偄偰傕傛偄偺偩
偔傜偄偺婥帩偪偱婥崌擖傟偰奐偗傞丅
0.3冇偺僪儕儖偼愜傟傗偡偄丅廫暘拲堄偟偰偔偩偝偄丅
 揔摉側挿偝偵0.3冇偺僺傾僲慄傪愗傞丅
揔摉側挿偝偵0.3冇偺僺傾僲慄傪愗傞丅
嵎崬堈偄傛偆偵丆愗抐偟偨僺傾僲慄偺愭抂傪儎僗儕偱愲傜偣傞丅
幨恀偼僈儔僗丒儎僗儕偱偁傞丅
 弖愙傪彮偟偩偗偮偗偰丆愭偵奐偗偨寠偵墴偟崬傓丅
弖愙傪彮偟偩偗偮偗偰丆愭偵奐偗偨寠偵墴偟崬傓丅
弖愙傪廫暘姡偐偣傞丅
摨條偵傕偆1屄傕僺傾僲慄傪偮偗傞丅
 崿崌僶乕懁傕丆儃乕儖偑晅偄偰偄偨埵抲偵0.3冇偺寠傪奐偗傞丅
崿崌僶乕懁傕丆儃乕儖偑晅偄偰偄偨埵抲偵0.3冇偺寠傪奐偗傞丅
愭偵嶌偭偨儃乕儖晹傪嵎偟崬傓丅
弖愙傪棳偟崬傒側偑傜丆墱傑偱嵎偟崬傓丅
傾僋儕儖丒僒儞僨乕偺曽偑嫮椡偵愙拝偱偒傞偑丆旕忢偵埖偄偑擄偟偄丅
撍偒弌偨僺傾僲慄傪愗抐偟丆愗抐柺傪儎僗儕偱杹偔丅
偙傟偱姰惉丅
僆儕僕僫儖傛傝嫮偄偺偩丅僴丆僴丆僴丆僴丅
怲廳偵慻傒晅偗丆帋尡旘峴
偤傫偤傫栤戣側偔旘傇丅
彮乆栤戣偑偁偭偰傕僿僞側偺偱丆晹昳偑埆偄偺偐榬偑埆偄偺偐暘偐傜傫両
Blade Controller偺曗嫮
4G3偺Blade Controller偺儕儞働乕僕朹偼4#3B側傫偐偲偼斾傋暔偵側傜側偄偔傜偄暘岤偄丅
偡傢傢偪丆偦傟偩偗偟偭偐傝愙懕偝傟偰偄傞丅
備偊偵丆徴寕傪庴偗偨偲偒丆儕儞働乕僕晹暘偑奜傟偢偵儃乕儖晅偗崻偑愜傟傞偙偲偵側傞丅
揮偽偸愭偺忨丅儃乕儖晹暘傪愜傞慜偵曗嫮偟偰偍偔偙偲偵偟偨丅
 傑偢丆0.3冇偺僪儕儖偱丆怲廳偵寠傪奐偗傞丅
傑偢丆0.3冇偺僪儕儖偱丆怲廳偵寠傪奐偗傞丅
恀偭捈偖奐偗側偄偲丆儃乕儖摦嶌晹暘偵撍偒敳偗偰偟傑偆丅
 寠偑奐偄偨傜丆0.3冇偺僺傾僲慄傪弖愙偲嫟偵嵎偟崬傓丅
寠偑奐偄偨傜丆0.3冇偺僺傾僲慄傪弖愙偲嫟偵嵎偟崬傓丅
廫暘偵弖愙偑姡偄偨傜丆梋暘側慄傪愗傝庢傝丆儎僗儕偱暯傜偵側傜偡丅
偙傟偱奿抜偵嫮偔側偭偨丅彮乆棊偲偟偰傕妱傟側偄丅
(傑偢偼棊偲偝側偄傛偆偵偡傋偒偩偗偳丅丅丅)
XRB僽儗乕僪棳梡
 壗搙傕棊偲偟偰偄傞偲丆儊僀儞丒僽儗乕僪偑儃儘儃儘偵側偭偰偒偨丅
壗搙傕棊偲偟偰偄傞偲丆儊僀儞丒僽儗乕僪偑儃儘儃儘偵側偭偰偒偨丅
岎姺晹昳偼摉暘撏偐側偄丅
傛偔帡偨乮偁傑傝帡偰側偄偗偳乯XRB偺僽儗乕僪(B)傪巊偭偰傒傞偙偲偵偟偨丅
庢傝晅偗晹暘偺寠偲岤傒偼摨偠丅彮偟XRB偺曽偑挿偄丅
 庢傝晅偗寠偺墱峴偒偑挿偡偓傞偺偱丆僴僒儈偱梋暘傪僇僢僩偡傞丅
庢傝晅偗寠偺墱峴偒偑挿偡偓傞偺偱丆僴僒儈偱梋暘傪僇僢僩偡傞丅
傕偪傠傫丆僶儔儞僗偼姰慡偵偲偭偰偍偐側偄偲側傜側偄丅
偁偲丆擯傟嬶崌偑懙偭偰偄傞僽儗乕僪傪慖傇偲傛偄丅
 4G3偵庢傝晅偗傞偲丆偐側傝挿偔姶偠傞偑丆僥乕儖丒僽儗乕僪偵摉傞偙偲偼側偄丅
僺僢僠偺弶婜抣傪(DipSW No.11=ON帪偺V1)傪儅僀僫僗懁偵夞偟偰挷惍偡傞丅
4G3偵庢傝晅偗傞偲丆偐側傝挿偔姶偠傞偑丆僥乕儖丒僽儗乕僪偵摉傞偙偲偼側偄丅
僺僢僠偺弶婜抣傪(DipSW No.11=ON帪偺V1)傪儅僀僫僗懁偵夞偟偰挷惍偡傞丅
僩儔僢僉儞僌偼儕儞働乕僕傪挷惍偡傞傛傝丆僽儗乕僪偺偟側傝傪巜偱嬋偘偰曗惓偡傞丅
嵟弶偐傜崌偭偨慻傪慖傜傇偺偑傛偄丅
嫲乆晜偐偟偰傒傞偲丆側傫偲丆傑偲傕偵旘傇偱偼側偄偐丅
XRB偺僽儗乕僪B傪晅偗偰旘峴
3D傪偡傞傢偗偱偼側偄偐傜丆XRB偺僽儗乕僪偱傕廫暘偱偁傞丅
幒撪傪僼儔僼儔旘傫偱偄傞暘偵偼丆憖嶌惈偼傎傏摨偠偱偁傞丅
偍傑偗偵僽儗乕僪偑廮傜偐偄偺偱丆傇偪摉偭偰傕僟儊乕僕偑彮側偄丅
斀柺丆僽儗乕僪偑傛偨偭偰偒偰庻柦傕抁偄偩傠偆丅
XRB偺僽儗乕僪偼堦攖嵼屔偑偁傞丅偙傟偱怱抲偒側偔楙廗偱偒傞偺偩丅
僥乕儖丒儘乕僞偺幉
僺僢僠丒僇乕僽傕偩偄偨偄帺暘偵崌偭偰偒偰丆偩偄傇憖廲偵姷傟丆傛偟3D儌乕僪偩丅
3D儌乕僪偼懬偺岠偒偑傛偄丅偙傝傖偁偄偄偧丆偲偐巚偭偰偄偨傜寖撍丅
 崱搙偼僥乕儖丒儘乕僞偺幉傪嬋偘偰偟傑偭偨丅
崱搙偼僥乕儖丒儘乕僞偺幉傪嬋偘偰偟傑偭偨丅
偙偺晹昳偼敪拲偟偰偄側偄丅
嶌傟偽偄偄偐偲丆傛偔尒傞偲丆偡偭偛偔暋嶨側宍忬丅
1.5冇偺D僇僢僩幉偵僊傾偑偼傑傝丆1.0冇偺D僇僢僩幉偵僥乕儖丒儘乕僞偑偼傑傞丅
偙傟偼娙扨偵偼嶌傟側偄偺偱丆側傫偲偐恀偭捈偖偵廋惓偡傞丅
偙傟偱偩偄偨偄堦捠傝夡偟偨偐側丠
晹昳傪敪拲偡傞恖偼丆埲壓偺晹昳傪懙偊傞偙偲傪偍姪傔偟傑偡丅
丒Main Rotor Blades
丒Blade Controller
丒Tail Gear
丒Main Motor
丒Tail Motor
偪傚偭偲捛壛偱偡丅
丒LiPo Battery (3.7v 600mAh)乧乧乧屆偄揹抮偼巊偊傑偣傫
丒Battery Frame乧乧乧偄偮偺娫偵偐妱傟偰偄偨
丒Canopy乧乧乧側偤偐儃儘儃儘
丒Skid Landing乧乧乧側偤偐僌僯儍僌僯儍
傑偨捛壛丅
丒Main Rotor Shaft乧乧乧抦傜傫娫偵嬋偑偭偰偄偨
丒Screw Set乧乧乧嬋偑偭偨Rotor Shaft傪奜偡偲愜傟傞
嬥懏Blade Controller偺嶌惉
4G3偼Blade Controller(崿崌僶乕)偺僾儔偺儃乕儖偺朹偑嵶偡偓偰丆寖撍偡傞偲愜傟傗偡偄丅
僺傾僲慄曗嫮斉偼棳愇偵嫮偔愜傟側偄偑丆偙偙偩偗偱傕嬥懏僷乕僣偵曄峏偟偰傒傞偙偲偵偟偨丅
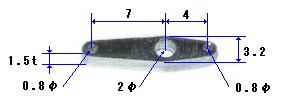 彫愳孨偑儌僨儔乕偱Blade Controller傪1.5t偺僕儏儔斅偐傜嶍傝弌偟偰偔傟偨丅
儕儞僋丒儃乕儖偼Walkera 4#3偺 Linkage set HM-4#3A-Z-08($5.30)偺拞偺嬥懏儕儞働乕僕朹傪2偮偵愗偭偰巊偆丅
HM-4#3B-Z-06($3.5)偵傕摨偠儕儞働乕僕朹偑擖偭偰傞丅
彫愳孨偑儌僨儔乕偱Blade Controller傪1.5t偺僕儏儔斅偐傜嶍傝弌偟偰偔傟偨丅
儕儞僋丒儃乕儖偼Walkera 4#3偺 Linkage set HM-4#3A-Z-08($5.30)偺拞偺嬥懏儕儞働乕僕朹傪2偮偵愗偭偰巊偆丅
HM-4#3B-Z-06($3.5)偵傕摨偠儕儞働乕僕朹偑擖偭偰傞丅
傑偨丆4G3 Guide Ball($3.50)偵丆僱僕晅偒偺儕儞僋儃乕儖偑擖偭偰傞偑丆
彮偟儃乕儖朹偺悺朄偑挿偄丅偪傚偭偲壛岺偟側偄偲巊偊側偄偲巚傢傟傞丅

 4#3偺儕儞僋朹傪揔摉偵敿暘偵愗抐偟丆愗傝岥傪儎僗儕偱寉偔愲傜偣傞丅
4#3偺儕儞僋朹傪揔摉偵敿暘偵愗抐偟丆愗傝岥傪儎僗儕偱寉偔愲傜偣傞丅
僕儏儔偺僶乕偺寠偵墱傑偱嵎崬傒丆悺朄傪妋擣偡傞丅
惓妋偵4.2mm偵愗抐偟丆愭傪儁儞僠偱捵偡丅
偙傟偼徴寕偱儕儞僋丒儃乕儖偑敳偗側偄傛偆偵偡傞偨傔偱偁傞丅
 僶乕偺抁偄傎偆丆偡側傢偪僗儚僢僔儏偐傜棃傞儕儞働乕僕偼丆
僽儗乕僪丒僌儕僢僾偺埵抲偵傛傝悺朄偑寛傑偭偰偟傑偆丅
僶乕偺抁偄傎偆丆偡側傢偪僗儚僢僔儏偐傜棃傞儕儞働乕僕偼丆
僽儗乕僪丒僌儕僢僾偺埵抲偵傛傝悺朄偑寛傑偭偰偟傑偆丅
僆儕僕僫儖傛傝彮偟儃乕儖朹偺挿偝傪抁偔偟偨曽偑儕儞働乕僕偵柍棟偑側偄丅
僽儗乕僪丒僌儕僢僾偲偺埵抲娭學偵傛傞偑丆巹偺婡懱偼3.9mm偩偭偨丅

 栘斅偵1.8冇偺寠傪偁偗丆儕儞僋丒儃乕儖偑偡偭傐傝偼偄傞帯嬶傪嶌傞丅
栘斅偵1.8冇偺寠傪偁偗丆儕儞僋丒儃乕儖偑偡偭傐傝偼偄傞帯嬶傪嶌傞丅
儕儞僋丒儃乕儖偺朹晹暘偵弖愙傪棳偟崬傒丆棤懁偐傜嬥捚偱扏偒崬傓丅
 偙傟偱偐側傝偟偭偐傝偟偨Blade Controller偑姰惉偡傞丅
偙傟偱偐側傝偟偭偐傝偟偨Blade Controller偑姰惉偡傞丅
2冇偺寠偺夞傝偼僽儗乕僪丒僌儕僢僾偲愙怗偡傞偺偱丆儁乕僷偱傛偔杹偄偰偍偔丅
 僆儕僕僫儖偺僾儔偺Blade Controller偲擖傟懼偊傞丅
僆儕僕僫儖偺僾儔偺Blade Controller偲擖傟懼偊傞丅
僗儖僗儖偵摦偔傛偆偵儕儞働乕僕晹暘偵僙儔儈僢僋丒僌儕僗傪揾偭偰姰惉丅
偙偺夵憿偱偼丆巆擮側偑傜埨掕搙偼曄壔偼側偄丅
寖撍偟偨偲偒偵Blade Controller偼夡傟側偄丅偨偩偟丆懠偺晹暘偑夡傟傞偐傕偟傟側偄丅
偙偺儌僨儔偱嶍偭偨僕儏儔儖儈儞惢偺Blade Controller晹昳傪
ORC SHOP偵偰
斝晍偟傑偡丅
愭拝10柤條偺傒丅
偨偩偟丆僶儕晅偒偱丆0.8冇偺寠偼搑拞傑偱偟偐奐偄偰傑偣傫丅
偙偺晹昳偺懠偵Walkera 4#3 Linkage set HM-4#3A-Z-08($5.30)
傕偟偔偼4#3B Metal Balance Bar HM-4#3B-Z-06($3.50)
偑昁梫偱偡丅
僆儕僕僫儖偺Blade Controller偼僱僕晅偒偱$4.5偱斕攧偝傟偰偄傑偡丅
惢嶌偼斾妑揑娙扨偱偡丅梸偟偄曽偼ORC傑偱儊乕儖偔偩偝偄丅
埨掕傪媮傔偰
僆儕僕僫儖偺僾儔偺Blade Controller偱傕摨偠偩偗偳丆
偳偆傕僗僞價儔僀僓乕夞傝偺儕儞働乕僕偑屌偄丅
崱夞丆嬥懏晹昳偵曄峏偟偨偮偄偱偵僗儉乕僘偵摦偔傛偆偵挷惍偟偰傒偨丅
 傑偢丆僿僢僪偐傜僗僞價娭楢偺儕儞働乕僕傪奜偡丅
傑偢丆僿僢僪偐傜僗僞價娭楢偺儕儞働乕僕傪奜偡丅
偐側傝屌偄偗偳丆僲乕僘丒儁儞僠偱偼偝傫偱夡偝側偄傛偆偵奜偡丅
僗僞價偺塇傪奜偡偲丆僗僞價丒儕儞僋丒儃乕儖偲堦弿偵敳偗傞丅
偙偺偲偒丆偳偪傜偺僽儗乕僪懁偐暘偐傞傛偆偵丆偦傟偧傟偺晹昳丆僽儗乕僪丒儂儖僟丆
僗儚僢僔儏偺儃乕儖丆偵儁僀儞僩丒儅乕僇偱報傪偮偗偰偍偔偲屻乆曋棙偩丅
Walkera偺応崌丆嵍塃偺晹昳傪擖傟懼偊偨偩偗偱埨掕惈偑曄傢偭偨傝偡傞丅
(4G3偼枹妋擣)
 1偮偺1偮偺儕儞働乕僕偑僗儉乕僘偵摦偔傛偆偵丆
儃乕儖丒僄儞僪偵僞儈儎偺僙儔儈僢僋丒僌儕僗傪揾偭偰丆
偔傞偔傞夞偡丅嬥懏儃乕儖偵擖傟偨傝奜偟偨傝偡傞偺傕岠壥偑偁傞丅
1偮偺1偮偺儕儞働乕僕偑僗儉乕僘偵摦偔傛偆偵丆
儃乕儖丒僄儞僪偵僞儈儎偺僙儔儈僢僋丒僌儕僗傪揾偭偰丆
偔傞偔傞夞偡丅嬥懏儃乕儖偵擖傟偨傝奜偟偨傝偡傞偺傕岠壥偑偁傞丅
儃乕儖丒僄儞僪丒儕乕儅偑偁傟偽堦敪側傫偩偗偳丆偙傫側彫偝側儃乕儖偺儕乕儅偼抦傜側偄丅
偁偲丆儃乕儖丒僄儞僪丒儕儉乕僶偑偁傟偽丆偐側傝曋棙偩丅
偙傟傕傑偩尒偮偗偰偄側偄丅
(傕偟抦偭偰偄傞恖偑偁傟偽嫵偊偰偔偩偝偄)
 僗僞價儔僀僓乕丒僶乕偑捠傞僗儕僢僩傕丆傛偔杹偄偰偍偙偆丅ORC偺偼僶儕偑巆偭偰偄偨丅
僗僞價儔僀僓乕丒僶乕偑捠傞僗儕僢僩傕丆傛偔杹偄偰偍偙偆丅ORC偺偼僶儕偑巆偭偰偄偨丅
ORC偺婡懱偼丆偙偺僗僞價-Blade Controller愙懕儕儞働乕僕偑堦斣廰偐偭偨丅
4#3B側偳偵斾傋偰儃乕儖丒僄儞僪晹暘偑暘岤偄偺偱丆偟偭偐傝儃乕儖偑浧傞丅
偦傟偱屌偔側傝丆摦偒偑偓偙偪側偄丅
慡偰偺儕儞働乕僕偺挷惍傪廔偊偨傜丆慻傒晅偗傞丅
壓偺價僨僆偺傛偆偵巜偱寉偔摦偔偔傜偄偵側傞偼偢偩丅
僸儘儃乕SRB傪栚昗偵偡傞偲傛偄丅
僗僞價夞傝偺儕儞働乕僕偺帋尡
傕偟丆偙偺價僨僆偺傛偆偵寉偔摦偐側偄側傜丆嵞搙丆1偮偯偮儕儞僋傪奜偡丅
懡暘丆偳傟偐1偮奜偡偲寉偔摦偔傛偆偵側傞丅
崻婥傛偔儃乕儖丒僄儞僪傪杹偔偟偐側偄丅
偱丆旘峴寢壥偼偳偆偐丠丂偲尵偆偲丆儂僶儕儞僌偺埨掕惈偼丆偐側傝傛偔側偭偨丅
儕儞働乕僕偑寉偔側偭偨偺偱丆僗僞價儔僀僓乕偺岠壥偑岦忋偟偨丅屻偼榬偩偗丅丅丅
捛婰
偙偺僕儏儔儖儈儞惢偺Blade Controller晹昳偺怽偟崬傒偑悢懡偔棃偰傑偡偑丆
姩堘偄偺柍偄傛偆偵嵞搙彂偄偰偍偒傑偡丅
Walkera 4G3偺儕儞働乕僕傪僗儉乕僘偵偡傞偺偼丆僆儕僕僫儖偺僾儔惢偺Blade Controller偱傕壜擻偱偡丅嬥懏惢偵曄峏偟偨偐傜寉偔摦偔傛偆偵側偭偨傢偗偱偼偁傝傑偣傫丅
偝傜偵丆嬥懏惢偵曄峏偟偰傕埨掕搙偵偼側傫傜峷專偟傑偣傫丅
妋偐偵寖撍偟偰傕Blade Controller帺懱偼夡傟傞偙偲偼側偄偲巚偄傑偡偑丆暿偺応強偑夡傟傞偐傕偟傟傑偣傫丅
偲偄偆拞搑敿抂側廔傝曽偩偲丆偳傟偩偗埨掕偟偨傫偩丠偲偐巚偭偰偟傑偆丅
埨掕旘峴偺價僨僆傪嶣偭偰傒偨丅
傑偁丆僿僞側杔偨偪偑憖廲偟偰傞妱偵偼埨掕偟偰傞偲巚偭偰偔偩偝傟丅
僗僞價夞傝挷惍屻偺埨掕旘峴???
偱丆師偼捘棊廤丅
Walkera 4G3 寖撍廤
偙傟偩偗捘棊偟偰傕Blade Controller偼夡傟側偐偭偨丅
偨偩偟僥乕儖丒僽儗乕僪丒僔儍僼僩偑嬋偑偭偨丅
摉弶偐傜丆傾僀僪儖丒傾僢僾偡傟偽埨掕搙偼傛偔側傞偺偐丆偲偄偆扨弮側媈栤偑巆偭偰偄偨丅
杮棃丆僗儘僢僩儖挷惍偱儌乕僞偺夞揮悢傪忋偘傟偽妋擣偱偒傞榖偩偗偳丆巆擮側偑傜摦偐側偄偺偱,
價價儕側偑傜3D儌乕僪偱傗偭偰傒偨丅
夛媍幒偱傾僀僪儖傾僢僾
3D儌乕僪憖廲拞偼嫽暠偟偰偄偰傛偔暘偐傜側偄偑丆彮偟偼傛偔側偭偨婥偑偡傞丅
儌乕僪愗懼僗僀僢僠傪忋偵偡傞偲偒丆偳偆偟偰傕塃庤偵椡偑擖傝丆僄儖儘儞傑偱摦偄偰偟傑偆丅
嫹偄応強偩偲丆寢壥偲偟偰丆僽僠摉傞偙偲偑懡偄丅
僽儔僔儗僗壔 (娙扨偵偼偄偐側偄偧)
偩偄傇憖廲偵傕姷傟丆儊僀儞丒儌乕僞傕僿僞傝巒傔偨偺偱丆
偦傠偦傠丆僽儔僔儗僗壔偱傕偟傛偆偐偲丆偄傠偄傠挷傋偰傒偨丅
 4G3偼恊愗偵傕3in1偐傜丆僒乕儃怣崋偑弌偰偄傞丅
4G3偼恊愗偵傕3in1偐傜丆僒乕儃怣崋偑弌偰偄傞丅
偦傟偧傟丆ESC丆儔僟乕偲偄偆柤慜偩丅
偳偆傕儔僟乕偲偄偆柤慜偼夦偟偄丅
偦偙偱丆偦傟偧傟偺僐僱僋僞偵Walkera 4#3偺僒乕儃傪愙懕偟偰傒偨丅
寢榑偩偗彂偔偲丆巆擮側偑傜儔僟乕僐僱僋僞偼丆僾儘億偺儔僟乕丒僗僥傿僢僋偺
怣崋偑偦偺傑傑弌偰偄傞偩偗偱偁傞丅
儈僉僔儞僌傕偝傟偰偄側偗傟偽丆僕儍僀儘傕岠偐側偄丅
棳愇丆Walkera丆偦偆娙扨偵偼僽儔僔儗僗壔傪偝偣偰偔傟側偄丅
儊僀儞儌乕僞偼偦偺傑傑ESC偺僐僱僋僞偵傾儞僾傪偮側偘偽丆娙扨偵僽儔僔儗僗壔偱偒傞丅
偲偙傠偑丆晄枮偑偁傞偺偼僥乕儖丒儌乕僞偺傎偆偱偁傞丅
偦偺傑傑傾儞僾傪偮側偄偱傕旘偽側偄丅
曽朄偼2偮偁傞丅1偮偼
ORC01丗曄姺婎斅
傪巊偭偰僥乕儖丒儌乕僞偺怣崋傪僒乕儃怣崋偵曄姺偡傞丅
傕偆1偮偼儈僉僒乕偲僕儍僀儘傪捛壛偡傞丅偨偩丆僕儍僀儘傪晅偗傞偔傜偄側傜丆庴怣婡偛偲岎姺偟偨曽偑
偄偄僾儘億偑巊偊傞偺偱丆偦偪傜偺曽偑傛偄偐傕偟傟側偄丅
僾儘億偺儕儃儕儏乕僔儑儞丒儈僉僔儞僌傪
巊偊偽庴怣婡懁偺儈僉僒乕偼徣棯偱偒傞偩傠偆丅
偝偀丆偳偆偡傞偐柪偆偲偙傠偱偁傞丅
儊僀儞偩偗僽儔僔儗僗偲偄偆偺偼丆
崙嶻挻埨掕壔僿儕
僸儘儃乕SRB
偲摨偠峔惉側偺偱丆埆偔偼側偄偑丅丅丅丅
僾儘億嵞傃
埲慜丆偐側傝慜偵丆Fujinawa偝傫偐傜僩儗乕僫弌椡偼惓忢偩偲BBS偵彂崬傒傪偄偨偩偄偨丅
偦傟傪僶僇側ORC偼偦傫側傾儂側偙偲偁傞偐偄!!偲挷傋傕偣偢偵僗儖乕偟偰偟傑偭偨丅
崱夞丆僽儔僔儗僗壔偵偁偨傝丆偄傠偄傠偲怣崋傪挷傋偰偄偨傜丆
慡偔Fujinawa偝傫偺偛巜揈偳偍傝偩偭偨丅
夵傔偰丆偍榣傃怽偟忋偘傑偡丅
偳偆偟偰丆偙傫側傾僼僅側偙偲偵側偭偰偟傑偭偨傫偩傠偆偐丠
偙傟偼憐憸偩偗偳丆僩儗乕僫弌椡偵偼曗惓側偟偺弌椡傪弌偟丆
RF(揹攇)偵偼曗惓偝傟偨偺傪弌椡偡傞偮傕傝偑丆媡偵側偭偨傫偩傠偆偐丠
僕儍僀儘姶搙偼僗僥傿僢僋偵柍娭學偩偐傜椉曽弌偰偄傞偺偐丠
偲偵偐偔丆偙偺曈偑Walkera傜偟偄丅
偝偰丆栤戣偺僾儘億怣崋偩偑丆埲壓偺傛偆偵側偭偰偄傞丅
ch.1,2,5 CCPM
ch.3 僗儘僢僩
ch.4 儔僟乕
ch.9 僕儍僀儘姶搙
傑偨丆CCPM OFF(DIP SW 9=OFF)偺儌乕僪傕惓忢偵摥偒丆
乮偙傟偼揹攇懁傕OK乯埲壓偺傛偆側僠儍儞僱儖偵側傞丅
ch.1 僄儗儀乕僞
ch.2 僄儖儘儞
ch.3 僗儘僢僩
ch.4 儔僟乕
ch.9 僕儍僀儘姶搙
偟偨偑偭偰丆CCPM傪OFF偵偟偰丆巗斕偺
USB僔儈儏儗乕僞丒働乕僽儖偵Walkera僾儘億傪偮側偖偲丆
FMS側偳偺僔儈儏儗乕僞偱楙廗偡傞偙偲偑偱偒傞丅
嵞搙丆奺僩儕儅偺摦偒傪婡懱懁偱妋擣偟偰傒偨丅
DIP僗僀僢僠No.10偺僗儘僢僩儖丒僇乕僽偲僒乕儃偺僇乕僽偼丆傗偼傝挷惍偱偒側偄丅
偲偙傠偑丆DIP僗僀僢僠No.12丆V1偺僕儍僀儘姶搙偩偗偼丆挷惍偱偒傞偺偑暘偐偭偨丅
V1偑-100%偲0偺娫偱偼尠挊偵曄壔偡傞丅0乣100%偺娫偼丆偦傟傎偳姶搙偺曄壔偼側偄丅
+100%偵偟偰傕丆僴儞僠儞僌偑婲偙傞偔傜偄僕儍僀儘姶搙偼忋偑傜側偄丅
偍偦傜偔偦傟偱岠偄偰側偄偲姩堘偄偟偨丅怽偟栿偛偞偄傑偣傫偱偟偨丅
嬥懏僷乕僣
Jade偺嬥懏僷乕僣偑棃偨丅
Blades Holder偲Blade Controller丆Swashplate偺3揰僙僢僩偱偁傞丅
慡懱揑偵傾儖儅僀僩壛岺偟丆奜尒偼旤偟偔巇忋偘傜傟偰偄傞丅
摿偵丆嬥懏僗儚僢僔儏偼戝曄傛偔弌棃偰偄偰丆僈僞偑傎偲傫偳柍偄丅
憗懍丆庢傝晅偗偰傒偨丅
 傑偡丆儕儞働乕僕夞傝傪鉟楉偵奜偡丅
傑偡丆儕儞働乕僕夞傝傪鉟楉偵奜偡丅
師偵BLade Holder傪挌擩偵奜偡丅
偙傟偑偗偭偙偆戝曄偱偁傞丅
Blade Holder偼1.5冇偺僗僥儞儗僗丒僷僀僾(Rotor Shaft)偵M1.0偺僱僕偱椉抂偐傜巭傔偰偁傞丅
 偲偙傠偑丆搙廳側傞寖撍偱Rotor Shaft偑嬋偑偭偰偨丅
偲偙傠偑丆搙廳側傞寖撍偱Rotor Shaft偑嬋偑偭偰偨丅
偦偆側傞偲M1.0偺僱僕偑娙扨偵娚傑側偄丅崻惈偱娚傔偨傜摢偐傜億僢僉儕愜傟偨丅
偍偦傜偔丆偗偭偙偆嬋偑偭偰偄傞恖偼懡偄偲巚偆丅
奜宎1.5冇撪宎0.8冇偺僗僥儞儗僗丒僷僀僾偑梡堄偱偒側偄恖偼丆
Main Rotor Shaft傪敪拲偟偰偍偄偨曽偑傛偄丅
傑偨暊棫偮偙偲偵Blade Holder傪巭傔傞僱僕偑晅懏偟偰偄側偄丅
M1.0偺僫儀丒僱僕傪帩偭偰偄側偄恖偼Screw Set傕棅傫偩傎偆偑傛偄丅
拲堄:奜宎1.5冇偺僗僥儞儗僗朹偱傕丆偦偺傑傑偱偼擖傜側偄丅
1.47冇傑偱彮偟儎僗儕偱嶍傜側偄偲側傜側偄丅僗僥儞僷僀僾偺婯奿偑堘偆丠
屻擔択
fly with the wind偺S巵偐傜儊乕儖傪捀偒丆僱僕偑奜傟側偄偺偼嬋偑偭偰偄傞偨傔偱偼側偔丆
僱僕儘僢僋偝傟偰偄傞偺偑尨場偩偲偍嫵偊偄偨偩偄偨丅
備偊偵丆嬋偑偭偰傞恖傕丆嬋偑偭偰側偄恖傕丆彮偟偱傕椡傪擖傟傞偲億僉儕偲愜傟傞丅
僴儞僟僑僥傗僶乕僫偱擬偟偰偐傜奜偡偲偆傑偔偄偔偦偆偱偡丅
偲偼尵偭偰傕丆僆儕僕僫儖偺僾儔惢晹昳偺拞偺僔儍僼僩傪擬偡傞偺偼丆偐側傝偺崲擄偩丅
 師偵丆揹抮働乕僗偲懌傪奜偟丆僊傾傪奜偡丅
師偵丆揹抮働乕僗偲懌傪奜偟丆僊傾傪奜偡丅
偙傟偑柍拑嬯拑戝曄偱丆偲偵偐偔屌偄丅
彫愳孨偑帪寁梡偺1冇億儞僠偱偨偨偒弌偟偰偔傟偨丅
僊傾偑奜傟傞偲丆杮懱偐傜僗僢億儕偲儊僀儞丒僔儍僼僩晹暘偑敳偗傞丅
屻擔択
偙傟傕S巵偐傜偺彆尵偱偁傞偑丆儊僀儞丒僊傾傪敳偔傛傝傕丆
僔儍僼僩忋懁偺Roter Head偺僺儞傪敳偔傎偆偑娙扨偱偁傞傜偟偄丅
偙傟偼丆偙傟偱丆戝曄偦偆偩偑丆偳偪傜偐偺僺儞傪敳偐側偄偲僗儚僢僔儏偼敳偗側偄丅
僗儚僢僔儏丒僾儗乕僩傪岎姺偡傞丅
偑丆偙傟偑丆傑偨丆戝曄丅嵎偡偩偗偲巚偭偨傜戝娫堘偄丅
曅懁偺寠偑彫偝偔偰儊僀儞丒僔儍僼僩偑擖傜側偄丅
恀傫拞偺嬍偼丆偔傞偔傞摦偔偺偱丆儎僗儕傪偐偗偰寠傪峀偘傞偺傕堦嬯楯丅
傎傫偺彮偟僐僗偭偰丆柍棟栴棟撍偭崬傓偲擖傞丅
偳偆傕埑擖偟偨偲偒偺僶儕偑巆偭偰偄偨傛偆偩丅
 師偵Blade Holder傪庢傝晅偗傞丅
師偵Blade Holder傪庢傝晅偗傞丅
偙傟偑丆傑偨丆戝曄丅1恖偱傗傞偵偼戝曄側嶌嬈偩丅
嵟弶偵僗僥儞僷僀僾偺曅懁偵僱僕傪掲傔傞丅
偦傟傪丆Blader Holder偵擖傟丆幨恀偺傛偆偵敳偗側偄傛偆偵儊僀儞僽儗乕僪傪庢傝晅偗傞丅
愲偭偨曽傪奜懁偵儚僢僔儍傪擖傟丆偦偺傑傑僿僢僪偵嵎偟崬傓丅
斀懳懁傕摨偠傛偆偵慻傒棫偰丆僱僕偱掲傔傞丅
1恖偱傗傞偵偼戝曄偩丅偙偺嵺丆嬤偔偵偄傞恖偵墳墖傪棅傕偆丅
 師偵Blade Controller傪庢傝晅偗丆偦傟偧傟偺儕儞働乕僕傪偔傒忋偘傞丅
師偵Blade Controller傪庢傝晅偗丆偦傟偧傟偺儕儞働乕僕傪偔傒忋偘傞丅
Jade僷乕僣偺儕儞働乕僕偼慡偰恀鐹惢偱偁傝丆旕忢偵僗儉乕僘偱偁傞丅
S巵偺彆尵偵傛傞偲丆Blade Controller偺儕儞僋丒儃乕儖偲庢傝晅偗僱僕偼
僱僕丒儘僢僋傪揾偭偰偍偄偨傎偆偑傛偄丅妋偐偵儐儖儐儖偩偭偨丅
 僿僢僪晹暘偑慻傒偁偑偭偨傜丆偄傛偄傛嵟屻偺擄娭丆儊僀儞丒僊傾偺庢傝晅偗偩丅
僿僢僪晹暘偑慻傒偁偑偭偨傜丆偄傛偄傛嵟屻偺擄娭丆儊僀儞丒僊傾偺庢傝晅偗偩丅
傑偢丆僺儞偺愭傪嵶偐偄僙儔儈僢僋儎僗儕偱戜宍忬偵愲傜偣傞丅
偩偄偨偄70%偔傜偄偺捈宎偵巇忋偘傞丅
儊僀儞丒僊傾傪僔儍僼僩偵嵎崬傒丆寠傪姰慡偵崌傢偣傞丅
僺儞傪僊傾偵嵎崬傒丆儔僕僆丒儁儞僠偱椉抂傪嫴傒崬傒埑擖偡傞丅
 傗偭偲姰惉丅偲偙傠偑丆Blade Controller偺儕儞働乕僕丒儃乕儖偺懌晹暘偑彮偟挿偡偓傞偨傔丆
僼儔僀僶乕偑儀儖儕儞僋丒儘僢僪偺峚偵彮偟嶤傟傞丅
傗偭偲姰惉丅偲偙傠偑丆Blade Controller偺儕儞働乕僕丒儃乕儖偺懌晹暘偑彮偟挿偡偓傞偨傔丆
僼儔僀僶乕偑儀儖儕儞僋丒儘僢僪偺峚偵彮偟嶤傟傞丅
傑偀丆捾梜巬偵僙儔儈僢僋僌儕僗傪揾偭偰壗搙偐忋壓偝偣傞偲僗儉乕僘偵摦偔傛偆偵側傞丅
 栤戣偼Blade Holder偺曽偱偁傞丅
栤戣偼Blade Holder偺曽偱偁傞丅
傎傫偺彮偟丆僆儕僕僫儖傛傝娫妘偑嫹偄偺偩丅
偟偨偑偭偰丆僽儗乕僪傪庢傝晅偗傞偲偒丆儁儞僠偱僽儗乕僪偺崻尦傪偟偭偐傝埑弅偟偰敄偔偟側偄偲丆
杸嶤偱僽儗乕僪偺摦偒偑屌偡偓傞偙偲偵側傞丅
僪儔僢僌丒儃儖僩傕僆儕僕僫儖傛傝暋嶨偩丅
僆儕僕僫儖偺Blade Holder偼僾儔惢側偺偱僞僢僺儞僌丒價僗傪掲傔偙傫偱偲傔偰偄傞丅
嬥懏惢偺曽偼壓懁偵僱僕偑愗偭偰偁偭偰丆
撍偒弌偨僪儔僢僌丒儃儖僩傪僫僢僩偱掲傔傞傛偆偵側偭偰偄傞丅
僽儗乕僪偺岎姺偑旕忢偵柺搢偱偁傞丅
XRB偺傛偆偵丆僶僇寠偵偟偰僫僀儘儞丒僫僢僩偱掲傔傞傛偆偵偟偨曽偑傛偄偐傕偟傟側偄丅
壓偺僱僕寠偑僶僇偵側偭偨傜丆偦偆偡傞偙偲偵偡傞丅
偝偰丆嬥懏僷乕僣傪晅偗偨5G3偺旘傃偼偳偆側偭偨偺偐丠
Walkera 4G3 嬥懏僷乕僣偺旘傃
僽儗乕僪傪廮傜偐偔庢傝晅偗傞偲丆僆儕僕僫儖偲傎偲傫偳曄傢傜側偄丅
Walkera偺4G3偺HP
傪尒傞偲丆弮惓偺嬥懏晹昳偑敪昞偝傟偰偄傞丅
弮惓偼Roter Head傗儀儖儕儞僋丒儘僢僪傑偱梡堄偝傟偰偄傞丅
偨偩偟丆僗儚僢僔儏丒僾儗乕僩偺忋懁偼僾儔惢偱偁傞丅
偳偪傜傪慖傇偐偼擸傓偲偙傠偱偁傞丅
 寢嬊偺偲偙傠丆僗僞價儔僀僓丒僶乕偑儀儖儕儞僋丒儘僢僪偵嶤傟傞偺偱丆
ORC僆儕僕僫儖偺Blade Controller偵栠偟偨丅
寢嬊偺偲偙傠丆僗僞價儔僀僓丒僶乕偑儀儖儕儞僋丒儘僢僪偵嶤傟傞偺偱丆
ORC僆儕僕僫儖偺Blade Controller偵栠偟偨丅
巆擮側偑傜丆埨掕搙偼摨偠偱偁傞丅偁偔傑偱婥暘偺栤戣偱偁傞丅
偱丆偙偺Jade惢偺Blade Controller(僱僕丒儘僢僋張棟嵪傒)偑晄梫偵側偭偨偺偱丆
偪傚偭偲偔傜偄嶤傟偰傕偄偄傗偀偲偄偆恖丆愭拝1柤條偵恑掓偟傑偡丅
ORC傑偱儊乕儖偔偩偝偄丅
僥乕儖丒儀傾儕儞僌
Walkera惢昳偼堦斒揑偵儀傾儕儞僌偑慹埆偱偁傞丅
埨偄儀傾儕儞僌巊偭偰傞偐傜丆摉偨傝慜偲尵偊偽摉偨傝慜丅
 偦偙偱丆儈僱儀傾偺儃乕儖丒儀傾儕儞僌 DDL-310 傪擖庤偟偨丅
偦偙偱丆儈僱儀傾偺儃乕儖丒儀傾儕儞僌 DDL-310 傪擖庤偟偨丅
彫偝偄側偑傜傕丆偟偭偐傝偟偨嶌傝偩丅
1屄385墌丅Walkera惢偺5攞埲忋偺壙奿偱偁傞丅
5攞埲忋偺庻柦偑偁傞偐偳偆偐偼暘偐傜側偄丅
 悺朄傕傄偭偨傝偱丆拲堄偟偰僺儞僙僢僩偱偮偐傫偱墴偟崬傓丅
悺朄傕傄偭偨傝偱丆拲堄偟偰僺儞僙僢僩偱偮偐傫偱墴偟崬傓丅
傕偪傠傫丆夞揮偼僗儉乕僘偱偁傞丅
僥乕儖丒儌乕僞偺岎姺
偳偆傕僥乕儖偺悩傢傝偑埆偄偺偱丆僥乕儖丒儌乕僞傪岎姺偟偨丅
僥乕儖丒儌乕僞偺敪擬偼彮側偄偺偱丆儊僀儞丒儌乕僞傛傝挻庻柦偺偼偢偱偁傞偑丆
岎姺偟偰傒偨丅
寢榑偐傜彂偔偲丆尨場偼僥乕儖丒儌乕僞偱偼側偐偭偨丅
 側偤丆傢偞傢偞婰帠偵偟偨偐偲尵偆偲丆埬奜戝曄偩偐傜偩丅
側偤丆傢偞傢偞婰帠偵偟偨偐偲尵偆偲丆埬奜戝曄偩偐傜偩丅
傑偢丆4in1偐傜僥乕儖丒儌乕僞偵愙懕偝傟偰偄傞僐僱僋僞傪敳偔丅
偙傟偑柺搢側傫偩偗偳丆巚偄愗偭偰敳偄偨曽偑丆屻乆偺嶌嬈偑娙扨偵側傞丅
僐僱僋僞偺懁柺偵僺儞僙僢僩傪堷偭妡偗偰丆寉偔儕乕僪慄傪堷偭挘偭偰敳偔偲敳偒傗偡偄丅
僥乕儖懁偐傜丆儕乕僪慄傪備偭偔傝堷偭挘偭偰丆僥乕儖懁偺梋暘傪怢偽偡丅
 僥乕儖丒儌乕僞偼4#3偵斾傋傞偲丆偐側傝偟偭偐傝偔偭偮偄偰傞丅
僥乕儖丒儌乕僞偼4#3偵斾傋傞偲丆偐側傝偟偭偐傝偔偭偮偄偰傞丅
傑偢丆儅僀僫僗丒僪儔僀僶偱偙偠偰丆彮偟弌偡丅
偁傑傝柍棟傪偟偰偼偄偗側偄丅
傕偭偲傕丆姰慡偵僟儊偵側偭偨僥乕儖丒儌乕僞側傜丆偙傟傎偳婥傪尛偆昁梫偑側偄偑丆
Walkera偺応崌丆僥乕儖丒儌乕僞晄椙偲恌抐偟偰傕丆堘偆偙偲偑傑傑偁傞丅
偲傝偁偊偢丆婥傪尛偭偰奜偟偰偍偄偰懝偼側偄丅
 僾儔僀儎乕偱寉偔偼偝傒丆堷偒敳偔丅
僾儔僀儎乕偱寉偔偼偝傒丆堷偒敳偔丅
偙偺偲偒丆儌乕僞偺恀傫拞傪偼偝傫偱偼偄偗側偄丅
屻抂偺抂巕偺偁傞晹暘偑嫮偄偺偱丆偦偙傪偼偝傓丅
備偭偔傝夞偡偲奜傟傞丅
4#3偲偼堎側傝丆廂弅僠儏乕僽偼娙扨偵偼奜傟側偄丅
側傞傋偔儌乕僞懁偺慄傪愗偭偰丆敿揷偛偰偺擬偱僠儏乕僽傪奜偡丅
 怴儌乕僞偺儕乕僪慄傪揔摉偵愗傝丆8mm掱搙旐暍傪傓偔丅
怴儌乕僞偺儕乕僪慄傪揔摉偵愗傝丆8mm掱搙旐暍傪傓偔丅
4in1偐傜棃偰傞墑挿儕乕僪慄偼丆慜偺儌乕僞偺僇僗傪鉟楉偵偡傞丅
偁傑傝擬傪偐偗偡偓傞偲丆旐暍偑梟偗傞丅
1mm偺廂弅僠儏乕僽傪儌乕僞懁偵擖傟傞丅
儌乕僞偺儕乕僪慄傪丆墑挿儕乕僪慄偵僺儞僙僢僩偱姫偒偮偗傞丅
寉偔僴儞僟傪棳偟偰丆廫暘偵椻傗偡丅
廂弅僠儏乕僽傪愙懕晹偵堏摦偝偣丆僪儔僀儎乕偱廂弅偝偣傞丅
僥乕儖偺懌偺岎姺
壗搙偐拝棨偡傞偲丆僥乕儖偺懌(Tail Knighthead)偑彴偵摉傝丆偩傫偩傫偲慇堐偑弌偰偔傞丅
偦偺偆偪愜傟偰偟傑偭偨丅
傕偆偪傚偭偲傛偄崙嶻偺1冇僇乕儃儞丒僔儍僼僩偵岎姺偡傞偙偲偵偟偨丅
 崻尦偐傜愜傟偰偄傞偺偱丆尦偺僇乕儃儞丒僔儍僼僩偺僇僗傪1冇偺僪儕儖偱偙偦偘傞丅
崻尦偐傜愜傟偰偄傞偺偱丆尦偺僇乕儃儞丒僔儍僼僩偺僇僗傪1冇偺僪儕儖偱偙偦偘傞丅
偗偭偙偆戝曄偱丆0.8冇偱拞怱晅嬤偵寠傪奐偗偰丆1冇偱峀偘傞傛偆偵偲傞丅
梋傝椡傪擖傟側偄傛偆偵偡傞偲丆尦偺寠偑拤幚偵暅尦偝傟傞丅
 儔僕僐儞丒僔儑僢僾偱攦偭偨1冇偺僇乕儃儞僔儍僼僩傪揔摉側挿偝偵愗偭偰丆
弖娫愙拝嵻傪偮偰偰嵎偟崬傓丅
儔僕僐儞丒僔儑僢僾偱攦偭偨1冇偺僇乕儃儞僔儍僼僩傪揔摉側挿偝偵愗偭偰丆
弖娫愙拝嵻傪偮偰偰嵎偟崬傓丅
寠偝偊暅尦偱偒傟偽屻偼娙扨偩丅
僽儗乕僪丒僟儞僷乕
慜弎偺S巵傛傝僽儗乕僪偼屌傔偵掲傔偨曽偑埨掕偡傞偲偄偆儊乕儖傪捀偄偨丅
偨偟偐偵屌傔偵掲傔偨曽偑埨掕偡傞偑丆屌偡偓傞偲懬傪愗偭偨偲偒晄埨掕偵側傞丅
偦偙偱丆儊僀儞丒僽儗乕僪偵晅壛偡傞僑儉丒僟儞僷乕傪岺晇偡傞偙偲偵偟偨丅
 僽儗乕僪丒儂儖僟乕偵偼傔崬傒丆僽儗乕僪偲僽儗乕僪丒儂儖僟乕偺娫偵嫴傑偭偰
僟儞僷乕岠壥偑弌傞傛偆側宍忬傪峫偊偨丅
僽儗乕僪丒儂儖僟乕偵偼傔崬傒丆僽儗乕僪偲僽儗乕僪丒儂儖僟乕偺娫偵嫴傑偭偰
僟儞僷乕岠壥偑弌傞傛偆側宍忬傪峫偊偨丅
僟儞僷乕偺岤傒1.0mm偐傜0.2mm崗傒偱2.0mm傑偱嶌惉偟偨丅
嵽幙偼摟柧僔儕儞僐儞丒僑儉偱偁傞丅
 幚嵺偵庢傝晅偗偰旘偽偟偰傒偨丅
幚嵺偵庢傝晅偗偰旘偽偟偰傒偨丅
儂僶儕儞僌帪偼丆僽儗乕僪傪屌偔掲傔偨偺偲摨偠岠壥偑偁傝丆偡偛偔埨掕偡傞丅
憱傜偟偨偲偒偼丆揔搙偵僽儗乕僪偑怳傟偰晄埨掕偵側傜側偄丅
偙傟偼偄偄!!!丅帺夋帺巀丅
ORC偺婡懱偼1.8mm岤偑堦斣傛偐偭偨丅
儂僶儕儞僌帪偵儅僢僞儕偲埨掕偟丆慁夞帪偼晛捠偵懬偑岠偔丅
椫僑儉偲偐偱傕戙梡偱偒傞偐傕偟傟側偄偑丆堦掕偺惛搙傪曐偮偺偼擄偟偄偩傠偆丅
幨恀偼嬥懏僽儗乕僪丒儂儖僟乕偩偑丆僆儕僕僫儖偺僾儔僗僠僢僋丒僽儗乕僪丒儂儖僟乕
偱傕摨條偺岠壥偑偁偭偨丅
 偄傠偄傠偲幚尡偟偨寢壥丆1.6mm 1.8mm 2.0mm岤偑丆巊偄傗偡偐偭偨偺偱丆怓傪曄偊偰3庬椶嶌傞偙偲偵偟偨丅
偄傠偄傠偲幚尡偟偨寢壥丆1.6mm 1.8mm 2.0mm岤偑丆巊偄傗偡偐偭偨偺偱丆怓傪曄偊偰3庬椶嶌傞偙偲偵偟偨丅
帺嶌偡傞曽偺偨傔偵丆
僽儗乕僪丒僟儞僷偺嶌傝曽
傪彂偄偰偍偒傑偡丅乮偲尵偆傛傝惢憿晽宨偐丠乯
傔偪傖傔偪傖嬯楯偟傑偡丅
庤傕懌傕僔儕僐乕儞偩傜偗偉丅丅丅
嵍偺幨恀偼1.8mm岤(崟)偺僟儞僷乕偱偁傞丅
 偪傚偆偳丆幨恀偺傛偆偵僽儗乕僪偺屻傠偑僟儞僷乕摉傝丆僽儗乕僪偺摦偒偑梷惂偝傟傞丅
偪傚偆偳丆幨恀偺傛偆偵僽儗乕僪偺屻傠偑僟儞僷乕摉傝丆僽儗乕僪偺摦偒偑梷惂偝傟傞丅
梷惂偺峝偝偼僟儞僷乕偺岤傒偱偁傝丆
梷惂偺検偼椉榚偵撌忬偺撍婲偺崅偝偵側傞丅
 傑偢丆僟儞僷乕丒僑儉傪僽儗乕僪丒僌儕僢僾偵庢傝晅偗傞丅
弮惓偺僾儔惢偺応崌丆僪儔僢僌丒儃儖僩偑掲傑傞撍婲偵摉傞偗偳丆
僟儞僷乕傪寉偔墑偽偟偰丆墱傑偱墴偟崬傓丅
傑偢丆僟儞僷乕丒僑儉傪僽儗乕僪丒僌儕僢僾偵庢傝晅偗傞丅
弮惓偺僾儔惢偺応崌丆僪儔僢僌丒儃儖僩偑掲傑傞撍婲偵摉傞偗偳丆
僟儞僷乕傪寉偔墑偽偟偰丆墱傑偱墴偟崬傓丅
棤昞偁傞偺偱拲堄偡傞丅墯傫偱偄傞曽偑僽儗乕僪懁丅
 2.0mm岤(愒)偲側傞偲丆彮偟庢傝晅偗偑柺搢偱偁傞丅
2.0mm岤(愒)偲側傞偲丆彮偟庢傝晅偗偑柺搢偱偁傞丅
傑偢丆僽儗乕僪偺寠傪僪儔僢僌丒儃儖僩偑僗儉乕僘偵擖傞傛偆偵丆
壗搙偐僪儔僢僌丒儃儖僩傪敳偒嵎偟偡傞丅
師偵丆
暊偱僽儗乕僪墴偝偊偮偗傞傛偆偵偟偰丆庢傝晅偗傞丅
姷傟傞傑偱彮偟嬯楯偡傞偐傕偟傟側偄丅
僪儔僢僌丒儃儖僩偼僽儗乕僪偑晜偐側偄掱搙偺儐儖儐儖偵掲傔傞偙偲丅
僽儗乕僪傪庢傝晅偗偨傜丆夞揮曽岦偵亄亅10搙偔傜偄壗搙偐摦偐偟偰側偠傑偣傞丅
傕偟丆2枃偺僽儗乕僪偱峝偝偑堎側傞側傜僽儗乕僪偺崻尦偑曄宍偟偰偄傞丅
僽儗乕僪偺崻尦偺宍忬傪儎僗儕偱惍偊傞丅
幚嵺偵2.0mm岤(愒)傪晅偗偰旘偽偟偰傒偨丅
Walkera 4G3 僽儗乕僪丒僟儞僷乕傪晅偗偨偲偒偺旘傃
儂僶儕儞僌帪丆旕忢偵埨掕偡傞丅
杔偺傛偆側僿僞僋僜偱傕丆偗偭偙偆偦偺応偵巭傑偭偰偄傜傟傞丅
偙傟偼僪儔僢僌丒儃儖僩傪峝傔偵掲傔偨偲偒偺嫇摦偲傎傏摨偠偩丅
慁夞帪偼揔搙偵僽儗乕僪偑摦偄偰丆傂偠傚偆偵傑偭偨傝偲偟偨摦偒偵側傞丅
1.8mm(崟)偼摦嶌偑彮偟僋僀僢僋偵側傞丅巹偼偙偪傜偺曽偑岲偒偩丅
1.6mm(墿)偼掅懍帪傎偲傫偳梷惂偟側偄偺偱丆奜偱旘偽偡偲偒岦偒偩偲巚傢傟傞丅
乮幚嵺偵奜偱旘偽偟偨偙偲偑側偄偺偱憐憸乯
 偙偺僽儗乕僪丒僟儞僷乕3庬椶6屄1慻傪
ORC SHOP偵偰
斝晍偟傑偡丅
偙偺僽儗乕僪丒僟儞僷乕3庬椶6屄1慻傪
ORC SHOP偵偰
斝晍偟傑偡丅
僔儕僐乕儞丒僑儉惢偱丆彮偟僶儕偑晅偄偰傑偡偑丆摦嶌忋偼慡偔塭嬁偁傝傑偣傫丅
愭拝11柤條偼偡偖偵敪憲偱偒傑偡丅
(偦傟埲崀偺曽偼師偺惢憿傑偱偟偽傜偔懸偭偰偄偨偩偔偙偲偵側傝傑偡)
梸偟偄曽偼ORC傑偱儊乕儖偔偩偝偄丅
懕偔丅丅丅丅
仯儔僕僐儞丒僿儕TOP傊